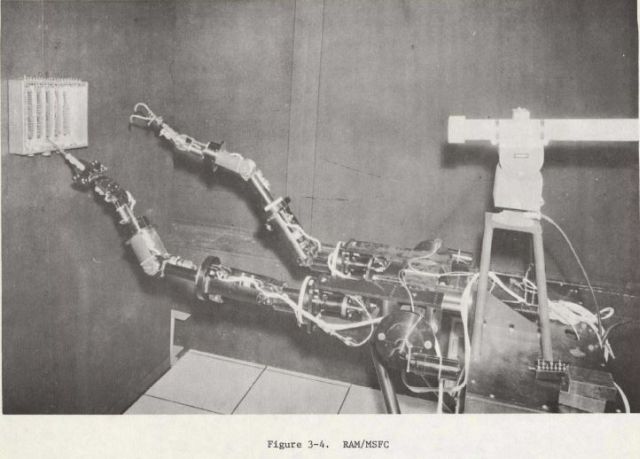
The Rancho Anthropomorphic Manipulator (RAM) was built to test manipulator arms for use aboard the Space Shuttle.
Orthotic manipulator arms. A man in space is relatively helpless in many respects; to perform useful work, he has to have special tools and some kind of assisting control mechanisms. The Atomic Energy Commission (AEC) has long been interested in perfecting remote manipulators for safely handling radioactive materials from a distance by human operators. These interests coincided with some of NASA's interests, and both groups recognized the significance of advances in externally powered arm braces that had occurred at Rancho. The combined efforts of all three organizations have advanced the sophistication of remote manipulators and of externally powered orthotic manipulators.
Orthotic manipulators resemble the human arm in construction and operation. In medical applications they restore arm function to paralyzed patients, while industrial, scientific, and space uses emphasize "teleoperator" characteristics in a master/slave mode that duplicate human motions at a distance.
NASA and AEC sought Rancho Los Amigos Hospital assistance in improving teleoperators largely because of the hospital staff's success in developing a powered orthosis, the Rancho Electric Arm (REA). Beginning in 1959 with pneumatic (compressed air) power sources,
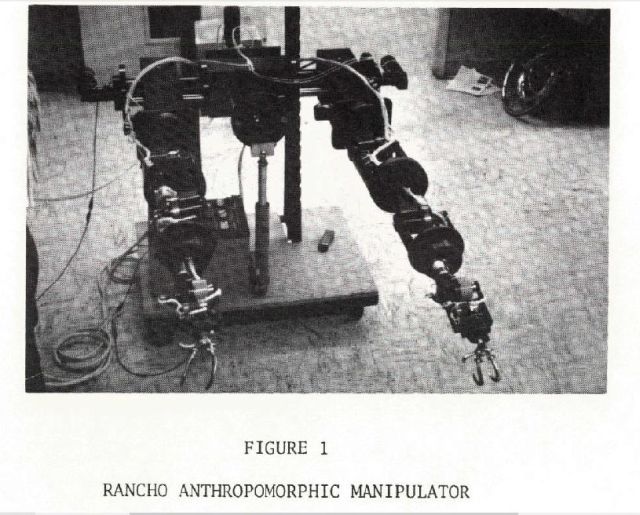
Rancho investigators determined that a functionally useful arm must have at least seven joints, or degrees of freedom, and they specified optimum alignments, locations, power requirements, angular velocities, and functional ranges of motion. In addition, they ascertained the characteristics and potential of control sites in various types of patients. Intensive analyses of normal arm motions enabled the team to specify operational mechanical configurations to approach as nearly as possible a duplication of normal arm function (see Figure 1 above).
After four years of work with pneumatic power, it was decided that an earlier consensus in the profession, -that electrical power was inferior to pneumatic power (National Research Council, 1961)–was no longer valid enough to preclude new explorations in electric power and control systems. The advantages of pneumatic systems were recognized: weight and cost of actuators were less than for electrical actuators; less noise is generated in the pneumatic system; and complex pneumatically powered orthoses were as much as 30 percent less costly than comparable electrically powered units. However, the advantages of electrical systems were more numerous and compelling. Among these are the greater ease and cheapness of replenishing the power source; greater efficiency of energy storage (by a factor of 10); no need to convert electronic control signals for pneumatic actuators; greater simplicity, versatility, and inexpensiveness of control signal processing units; availability of mass produced, low cost electronic components (versus individually produced costly pneumatic components); availability of a rotary output from an electrical actuator, which meets the need for rotary motion of the dynamic joints of an arm brace without a mechanical conversion of linear to rotary motion; and, very significantly, the ability to use a single energy system to provide ample power for both a wheelchair and an orthosis.
Development of the REA thus proceeded from the broad foundation of successful experience with pneumatically powered orthoses. By early 1965 an operational electric arm had been fitted to a patient for complete testing, evaluation and necessary modifications. Using the current version of the arm, this patient, who became a quadriplegic polio victim in 1954, is now able to perform many ordinary tasks of daily living, including writing, typing at 25 words per minute, and operating a modest telephone answering business.
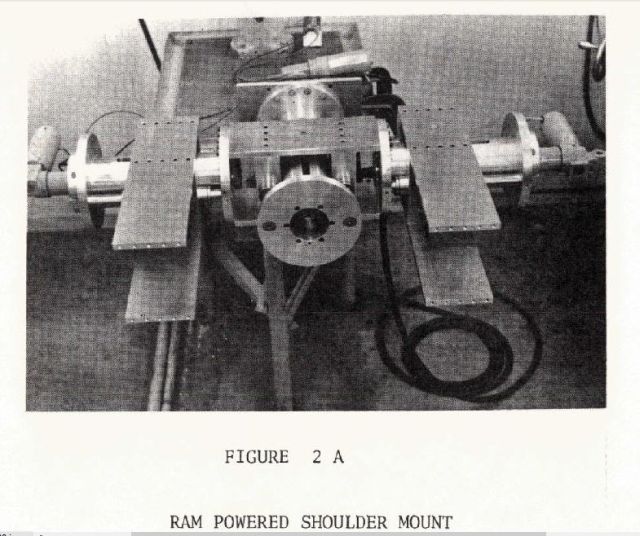
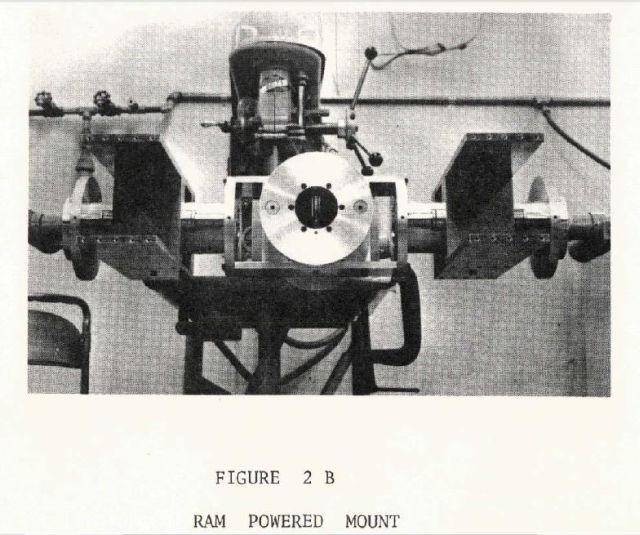
Under contract to Marshall Space Flight Center, Rancho's orthotic arm expertise has been directed toward development and fabrication of four remote manipulators. A bilateral remote manipulator delivered to Marshall was based on earlier arm designs and incorporated several improvements. Among these were two redesigned joints in the master controller brace and lighter, stronger, and more efficient slave arms (see Figure 2).
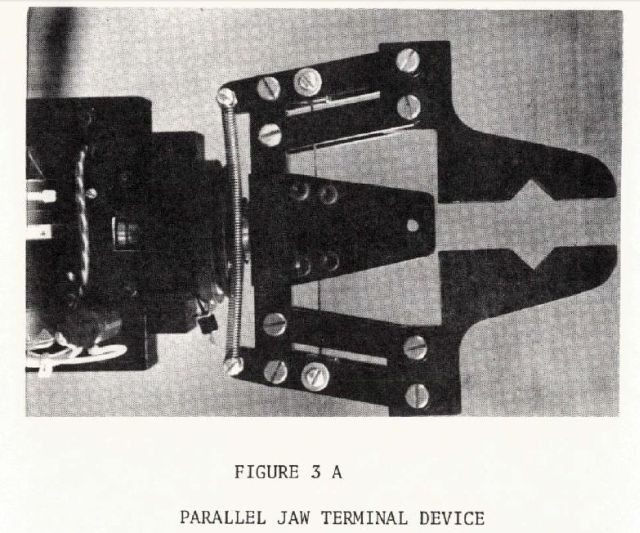
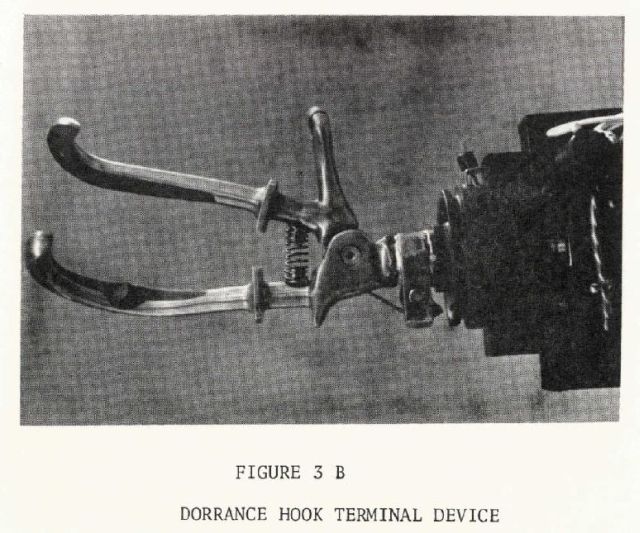
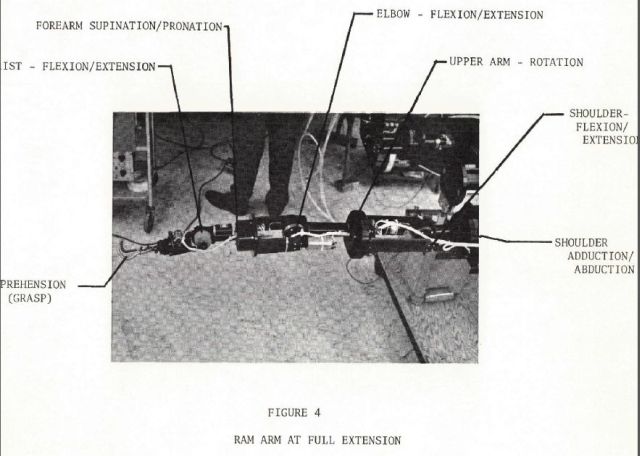
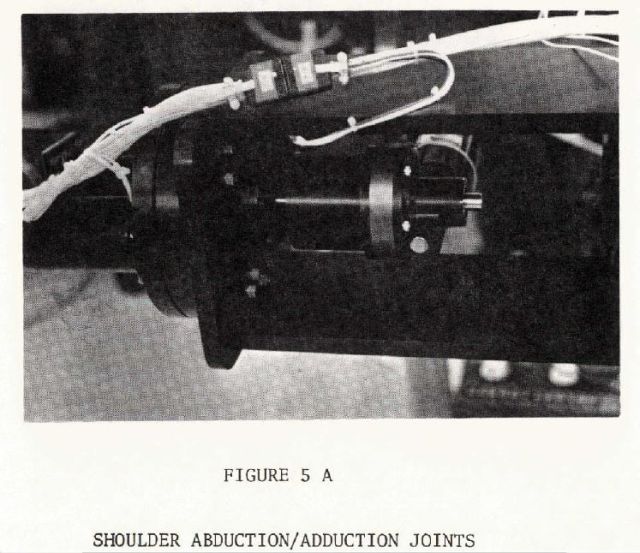
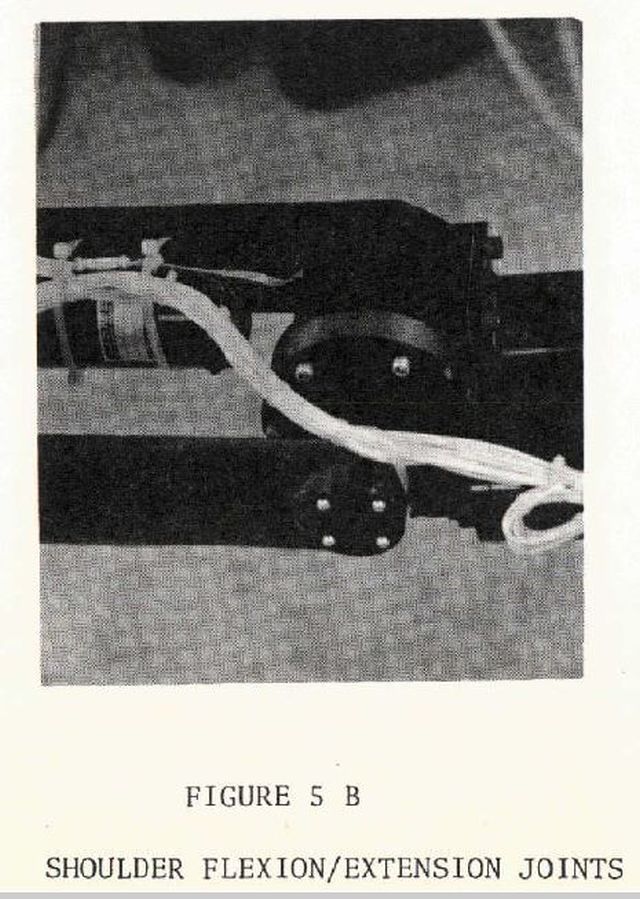
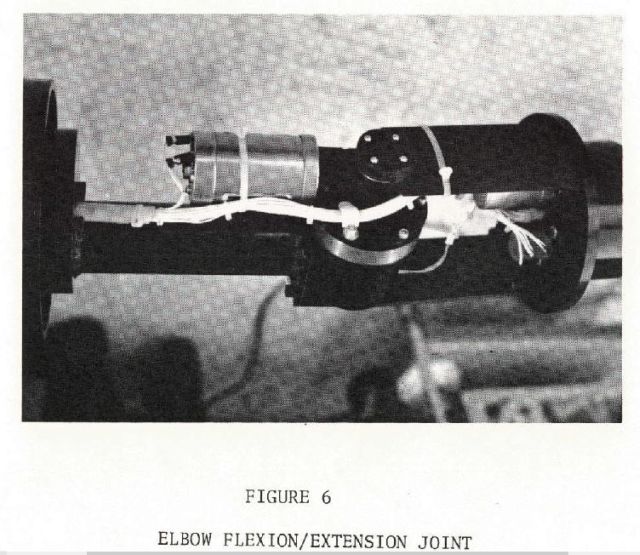
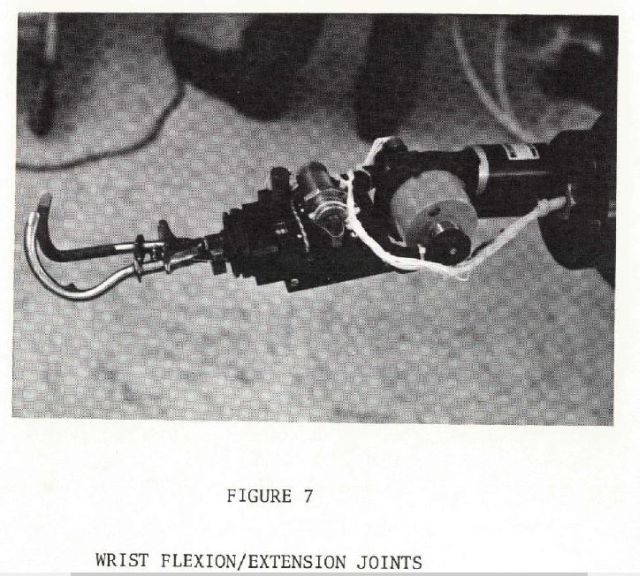
Finally, the Rancho Anthropomorphic Manipulator (RAM) exists as a demonstration prototype. RAM has the capability of operator-controlled terminal device replacement. It is mounted on a "shoulder" that allows side-to-side and forward-backward movement of four inches in each direction, as well as arm movement within the radius of the arms. Its size and power are much greater than those of the Rancho Electric Arm; RAM can lift and transport a ten-pound weight. Several control systems can be used, including a joystick. Development emphasis has been on a master/slave system with an exoskeleton control apparatus for the operator.
Beyond the immediately useful improvement of teleoperators that enable men to perform work in hostile environments, these research and development activities have enhanced Rancho's expertise in its area of major concern: rehabilitation of the disabled.

The video system control and display panel used in testing the arm in 1975 at Mashall Space Flight Center.
The earlier Rancho Los Amigos Electric Arm (REA) was a leader in its time. Originally designed as a powered orthosis, copies were modified for Stanford Artificial Intelligence Laboratory's "Hand-Eye" robot in 1967, used in the 1977 movie "Demon Seed" for Joshua the robot, attachment arms to the 1972 Free Flyer, and for the 1969 Self-propelled Amthropomorphic Manipulator (SAM).
See other early Space Teleoperators here.
See other early Lunar and Space Robots here.