Apollo-Soyuz Shuttle Manipulator Demo (1971-1972) – By David S. F. Portree , 05.14.2012
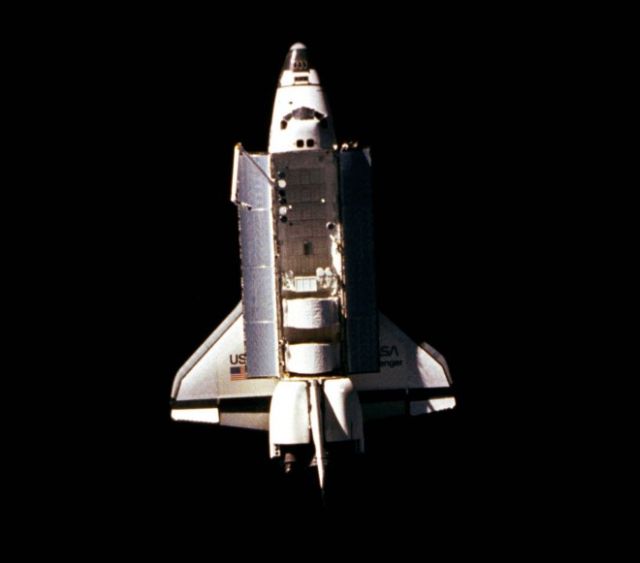
During the 1983 STS-7 mission, the crew of Shuttle Challenger used the Remote Manipulator System arm to deploy and retrieve the SPAS satellite, which captured this iconic image. The arm, bent to form the numeral “7,” is visible near the front of Challenger’s payload bay. Image: NASA.
Caldwell Johnson, co-holder with Maxime Faget of the Mercury capsule patent, was chief of the Spacecraft Design Division at NASA’s Manned Spacecraft Center (MSC) in Houston when he proposed that astronauts test prototype Space Shuttle manipulators during Apollo Command and Service Module (CSM) missions in Earth orbit. In a February 1971 memorandum to Faget, MSC’s director of Engineering and Development, Johnson described the manipulator test mission as a worthwhile alternative to the Earth survey, space rescue, and joint US/Soviet CSM missions then under study.
At the time, the Apollo 18, 19, and 20 lunar missions had been cancelled and the second Skylab space station (Skylab B) appeared increasingly unlikely to reach orbit. NASA managers foresaw that the mission cancellations would leave them with a stock of surplus Apollo spacecraft and Saturn rockets after the last mission to Skylab A. They sought low-cost Earth-orbital missions that would put the surplus hardware to good use and fill the expected multi-year gap in U.S. piloted missions between Skylab and the first Space Shuttle launch.
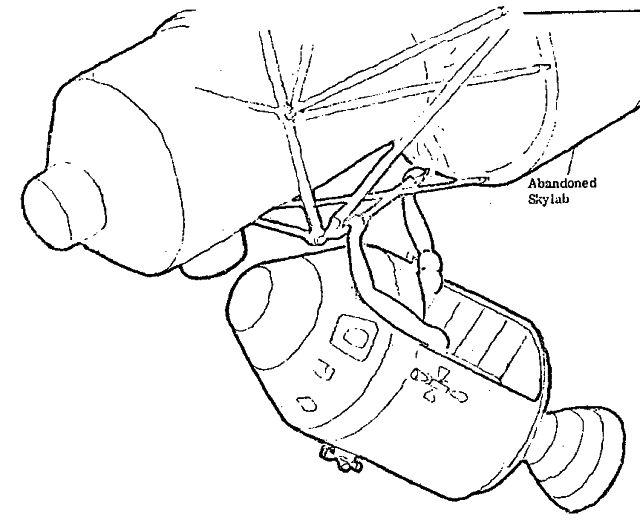
Twin human-like robot arms deploy from the Apollo CSM SIM Bay to grip the derelict Skylab space workshop. Image: NASA/Caldwell Johnson.
Johnson envisioned Shuttle manipulators capable of bending and gripping much as do human arms and hands, thus enabling them to hold onto virtually anything. He suggested that a pair of prototype arms be mounted in a CSM Scientific Instrument Module (SIM) Bay, and that the CSM “pretend to be a Shuttle” in operations with the derelict Skylab space station. The CSM’s three-man crew could, he told Faget, use the manipulators to grip and move Skylab. They might also use them to demonstrate a space rescue, capture an “errant satellite,” or remove film from SIM Bay cameras and pass it to the astronauts through a special airlock installed in place of the docking unit in the CSM’s nose.
Faget enthusiastically received Johnson’s proposal (he penned “Yes! This is great” on his copy of the February 1971 memo). The proposal generated less enthusiasm elsewhere, however.
Undaunted, Johnson proposed in May 1972 that Shuttle manipulator hardware replace Earth resources instruments that had been dropped for lack of funds from the planned U.S.-Soviet Apollo-Soyuz Test Project (ASTP) mission. He asked Faget for permission to perform “a brief technical and programmatic feasibility study” of the concept. Faget gave Johnson leave to prepare a presentation for Aaron Cohen, manager of the newly created Space Shuttle Program Office at MSC.
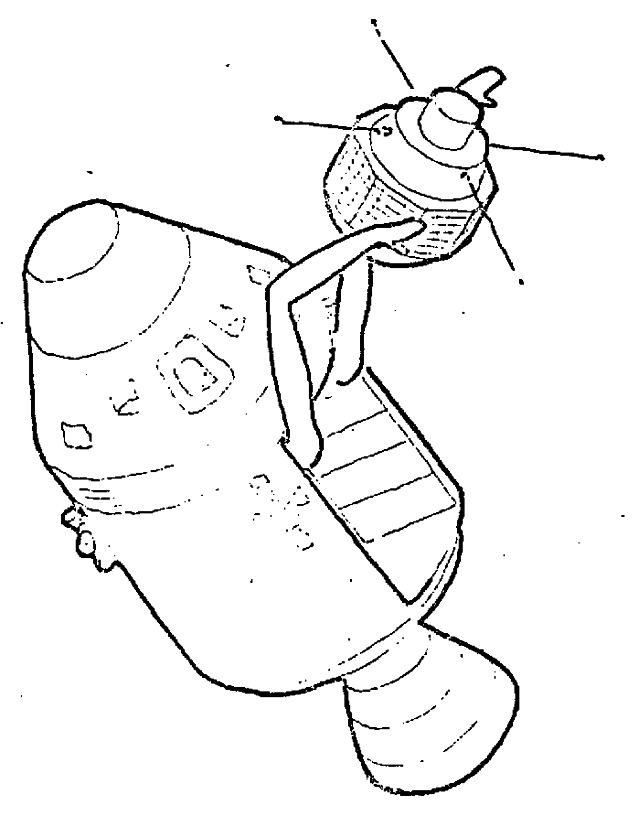
Twin robot arms capture a satellite. Image: NASA/Caldwell Johnson.
In his June 1972 presentation to Cohen, Johnson declared that “[c]argo handling by manipulators is a key element of the Shuttle concept.” He noted that CSM-111, the spacecraft tagged for the ASTP mission, would have no SIM Bay in its drum-shaped Service Module (SM), and suggested that a single 28-foot-long Shuttle manipulator could be mounted near the Service Propulsion System (SPS) main engine in place of the lunar Apollo high-gain antenna. During ascent to orbit, the manipulator would ride folded beneath the CSM near the ASTP Docking Module (DM) within the streamlined Spacecraft Launch Adapter.
During SPS burns, the astronauts would stabilize the manipulator so that acceleration would not damage it by commanding it to grip a handle installed on the SM near the base of the CSM’s conical Command Module (CM). Johnson had by this time apparently dropped the concept of an all-purpose human hand-like “end effector” for the manipulator; he informed Cohen that the end effector design was “undetermined.”
The Shuttle manipulator demonstration would take place after CSM-111 had undocked from the Soviet Soyuz spacecraft and moved away to perform independent maneuvers and experiments. The astronauts in the CSM would first use a TV camera mounted on the arm’s wrist to inspect the CSM and DM, then would use the end effector to manipulate “some device” on the DM. They would then command the end effector to grip a handle on the DM, undock the DM from the CSM, and use the manipulator to redock the DM to the CSM. Finally, they would undock the DM and repeatedly capture it with the manipulator.
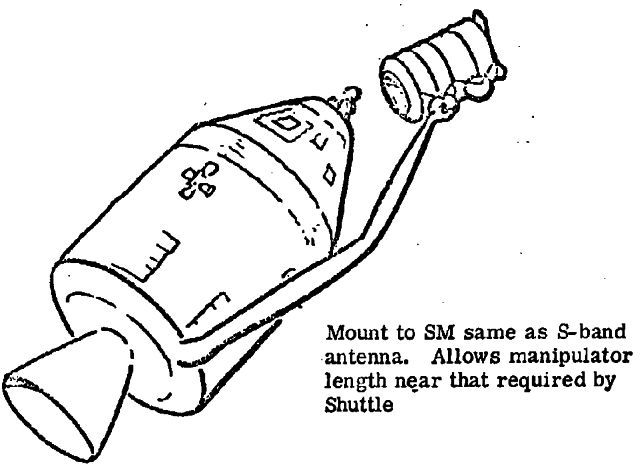
A single manipulator arm grips the Docking Module used to link the Apollo and Soyuz spacecraft in Earth orbit. Image: NASA/Caldwell Johnson.
Johnson estimated that new hardware for the Shuttle manipulator demonstration would add 168 pounds to the CM and 553 pounds to the SM. He expected that concept studies and pre-design would be completed in January 1973. Detail design would commence in October 1972 and be completed by July 1, 1973, at which time CSM-111 would undergo modification for the manipulator demonstration.
Johnson envisioned that MSC would build two manipulators in house. The first, for testing and training, would be completed in January 1974. The flight unit would be completed in May 1974, tested and checked out by August 1974, and launched into orbit attached to CSM-111 in July 1975. Johnson optimistically placed the cost of the manipulator arm demonstration at just $25 million.
CSM-111, the last Apollo spacecraft to fly, reached Earth orbit on schedule on July 15, 1975. By then, Caldwell Johnson had retired from NASA. CSM-111 carried no manipulator arm; the tests Johnson had proposed had been judged to be unnecessary. That same month, the U.S. space agency, short on funds, invited Canada to build the Shuttle manipulator arm. The Remote Manipulator System – also called the Canadarm – first reached orbit on board the Space Shuttle Columbia during STS-2, the second flight of the Shuttle program, on November 12, 1981.
References:
Memorandum with attachment, EW/Chief, Spacecraft Design Division, to EA/Director of Engineering and Development, Flight Demonstration of Shuttle docking and cargo handling techniques and equipment using CSM/Saturn 1-B, NASA Manned Spacecraft Center, February 1, 1971.
Memorandum with attachment, EW/Chief, Spacecraft Design Division, to PA/Special Assistant to the Manager, Demonstration of Shuttle manipulators aboard CSM/Soyuz rendezvous and docking mission, NASA Manned Spacecraft Center, May 25, 1972.
Memorandum with attachment, EW/Chief, Spacecraft Design Division, to LA/Manager, Space Shuttle Program Office, Proposal to Demonstrate Shuttle-type Manipulator During Apollo/Soyuz Test Project, NASA Manned Spacecraft Center, June 28, 1972.
Source: www.wired.com, May, 2012.
See other early Space Teleoperators here.
See other early Lunar and Space Robots here.