
TELEOPERATION – OBJECTIVES
The objectives of this FPE are to develop and evaluate an experimental teleoperator (T/O) system. Such a system would be a precursor to an operational system and would provide a means for evaluating teleoperator performance, safety, and suitability for performing various tasks in space. Upon completion of this experimental phase, the system would be converted to an interim operational tool for use with the Space Shuttle or Space Station while final design of a fully operational system was being completed.
PHYSICAL DESCRIPTION
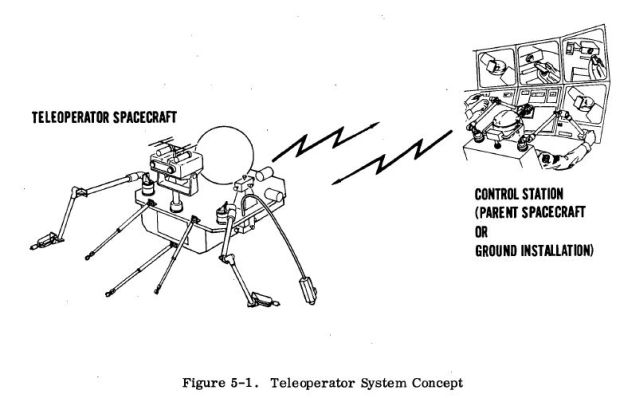
The experimental teleoperator (T/O) system comprises a small, free-flying T/O spacecraft and a control station. A two-way RF link provides commands to the T/O spacecraft and feedback information to the control station. The T/O system concept is depicted in Figure 5-1 above.
The T/O manipulator arms duplicate the motions of a human controller operating the master manipulator at the control Station. A stereoscopic TV system and manipulator force feedback provide the controller with a feeling of presence at the T/O work site.
The control station may be located in a parent spacecraft or in a ground installation.
An operational T/O system would be used to perform various inspection, assembly, maintenance, and servicing tasks in lieu of performance of these tasks by an astronaut in EVA. The experimental T/O system will be designed to perform representative tasks which will serve as the basis for comparing T/0 capabilities versus those of an EVA astronaut. The experimental teleoperator system to comprised of the following elements:
a. Teleoperator spacecraft.
b. Control station.
c. Support equipment.
d. Ground-based control station.
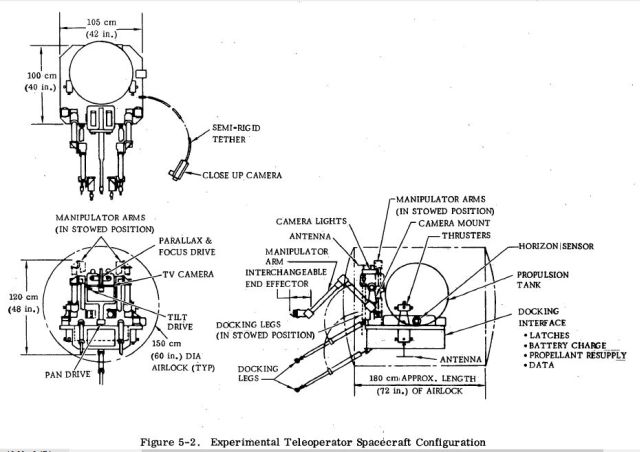
The teleoperator spacecraft, illustrated in Figure 5-2, consists of a structure housing the spacecraft subsystems, a propellant supply tank, four sets of quad thrusters, a two-axis camera mount, binocular TV cameras and lights, a single close-up TV camera, two manipulator arms with interchangeable end effectors, and three docking arms.
Control of the T/O is accomplished from the control station depicted in Figure 5-1 above.
The manipulators used on the T/O will be a three-joint design with a separable end effector. The manipulator arms will fold to reduce the envelope of the T/0 for docking and stowage as shown in Figure 5-2. The manipulators will use a closed-loop control system with force feedback to the master manipulator arms at the control station. The basic end effector will be the parallel jaw grasping mechanism. End effectors will be replaceable with special purpose tools, such as power driven wrenches, etc.
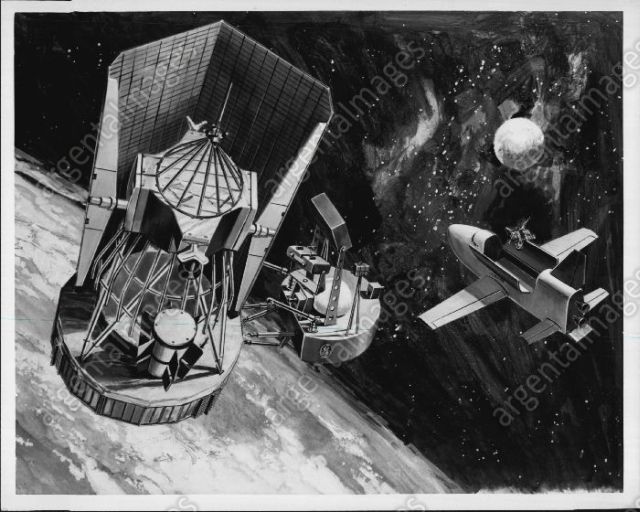
WASHINGTON–SPACE SHUTTLE–Inspection of a space shuttle before re-entry by a remote robot. Using a television camera and the arms of a robot an astronaut could control everything from inside the spacecraft.
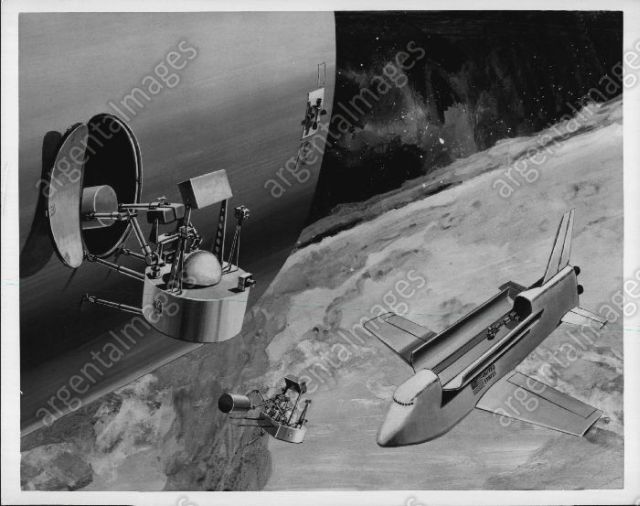


Above images released by NASA on November 17, 1970.
See other early Space Teleoperators here.
See other early Lunar and Space Robots here.