
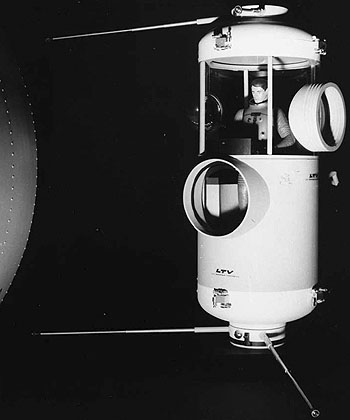
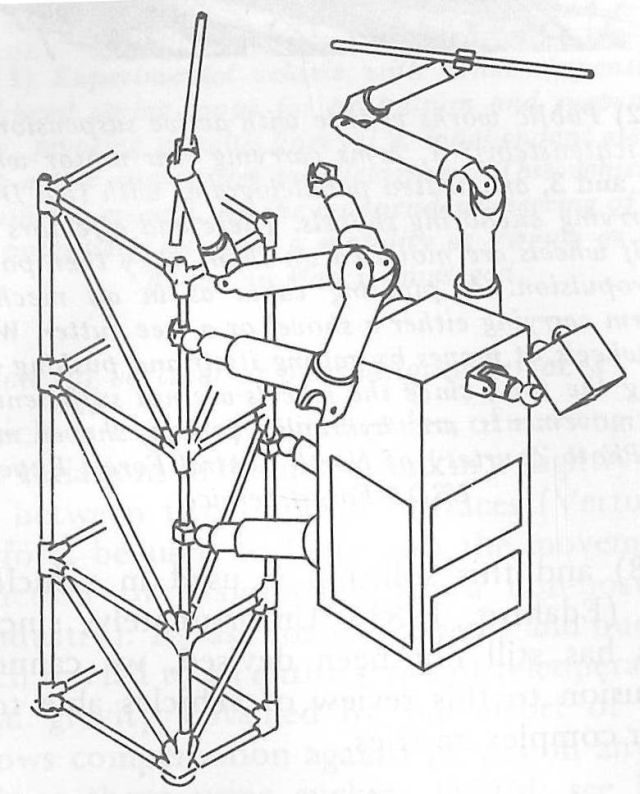
LTV Space Taxi concept.
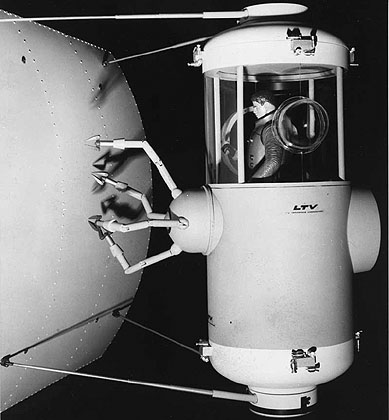
Mock-up using models.
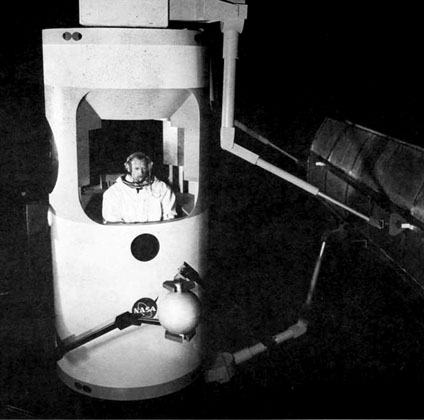
Full-scale mock-up
Images sourced from here as original pdf currently unavailable.
• Ling-Temco-Vought Maneuvering Work Platform and Space Taxi
In 1966, Ling-Temco-Vought (LTV), in conjunction with Argonne National Laboratory (ANL), completed a thorough investigation of manned maneuvering manipulator spacecrafts for the NASA Marshall Space Flight Center. The objectives of the LTV program, called the Independent Manned Manipulator (IMM) Study, were as follows
– Produce the conceptual designs and mockups of two selected IMM units which extend and enhance man's utilization in the support of AAP experiments and overall areas of EVA during future space exploration.
– Define Research, Development, and Engineering (RD&E) required to implement the IMM systems.
– Develop preliminary program definition plans which lead to flight-qualified hardware in the 1969-1971 time period.
The IMM vehicle designs were evaluated against NASA-specified criteria, and two concepts were selected for detailed analysis. the Maneuvering Work Platform (MWP) and the Space Taxi. The preliminary program definition plans were developed for obtaining the MWP flight-qualified hardware in the 1969-1971 time period and 1972-1974 for the Space Taxi.
• Space Taxi Configuration
The Space Taxi configuration, selected and recommended for use in 1975 and beyond, features a multiple crew station built into a rotary vehicle which permits orientation of each operator station relative to the worksite. Electrical bilateral master-slave manipulators were selected by AEC/ANL for incorporation into the Space Taxi configuration.
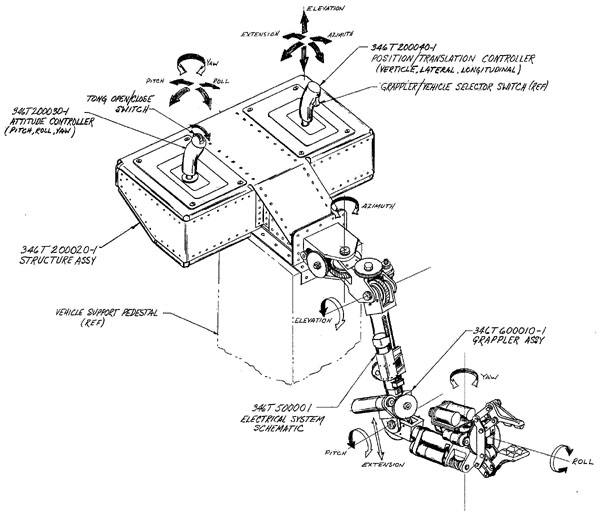
Figure 5-18 presents the preliminary design of the selected Space Taxi concept developed during the detail analysis phase. The basic vehicle consists of a cylindrical, structural shell, the center portion of which is a pressure vessel forming the crew compartment. The upper and lower unpressurized compartments contain vehicle subsystems and equipments. After worksite attachment, the basic taxi is free to turn about its longitudinal axis in rotary fashion. The rotational motion is accomplished with the upper and lower turrets which support the three anchoring and docking arms. Attached to the sides of the Taxi are the two maintenance manipulator slave arms. An Apollo docking adapter and hatch and an extravehicular maintenance egress hatch are provided. A major element inside the crew compartment is the dual function manipulator master controller. It can swing 180deg to serve as the worksite anchoring arm controller and is a bilateral maintenance manipulator controller.
The Space Taxi is designed for one crewman with the capability to carry another man in a rescue situation. The craft would have a range of approximately 1 1/4 miles in any orbital direction. Like the MWP, its normal duration is 8 hours with a rescue contingency of 2 hours. The physical characteristics of the Space Taxi are:
– Overall length* – 150 inches
– Overall width. – 84 inches (maximum)
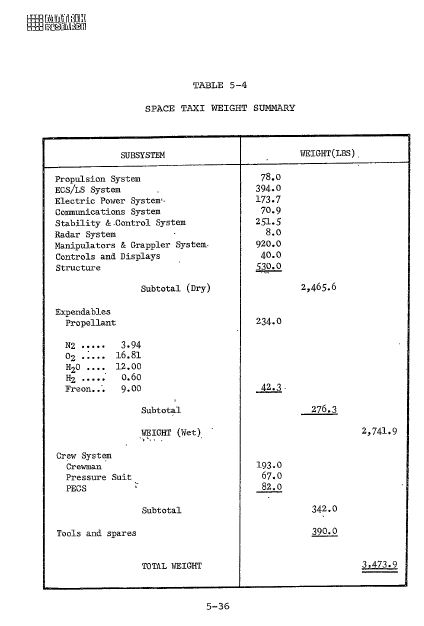
– Gross weight (nominal)** – dry, 3198 pounds; wet, 3474 pounds.
* Maximum stowage envelope
** Includes 732 pounds for crew systems and tools/ spares
Translation/Stabilization/Control Subsystem
The Space Taxi uses a hybrid stabilization and control system consisting of control moment gyros (CMG) and jet reaction components. Its characteristics are:
Propulsion:
Propellant – Monopropellant hydrazine
Total Impulse – 51,000 lb/sec.
Total deltaV capability – 488 ft/sec.
Stabilization and Control:
Stabilization and Control Deadband -+2deg
Acceleration (maximum)
Angular – Roll – 16.3deg/sec2
Pitch – 15deg/sec2
Yaw – 40deg/sec2
X – .97 ft/sec2
y – .48 ft/sec2
Z – .48 ft/sec2
Number of thrusters – 24 (25 lbs. max. thrust each)
Rotational rates (maximum)
Roll – 13.1deg/sec.
Pitch – 12deg/sec.
Yaw – 31.80deg/sec.
Actuator Subsystem
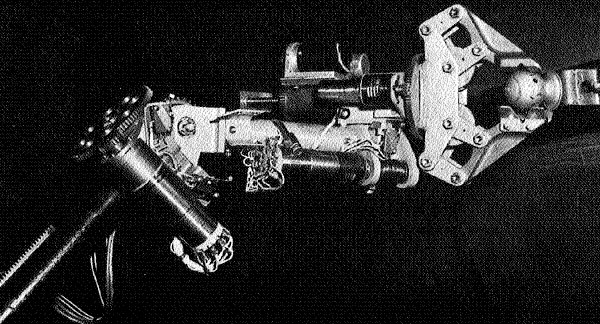
The actuator subsystem consists of three electrically connected bilateral docking and anchoring arms used for stabilization at the worksite and two electrically connected bilateral manipulators used for tasks at the worksite.
Environmental Control Subsystem
The SpaceTaxi ECS/LS system provides a 5 psia, 70/30 percent, oxygen-nitrogen atmosphere for closed-cabin operation.
ECS/LS Duration – Nominal 8 hours
Contingency, 2 hours
Metabolic Rates – Average 1250 Btu/hr.
Peak In excess. of 2150 Btu/hr.
Total heat load capability – 47,703 Btu Repreasurization cycles – 2
A Space Taxi weight summary is shown in Table 5-4 [below].
From 1960, Ray Goertz, who invented electrically remote manipulators for the nuclear industry, together with his team at Argonne Nuclear Laboratories (ANL), were engaged by NASA to specify teleoperator configurations for the Lunar space program. The result is illustrated above.
It should be noted that floating vehicles share one problem. This is their inability to stay immobile relative to the object on which they must act. Hence, they are equipped with docking arms, other than the manipulator(s) directly intended to execute the task, to attach them to the object of their task, whether this is another satellite or an underwater oil platform.
The LTV Space Taxi follows this generalized configuration.
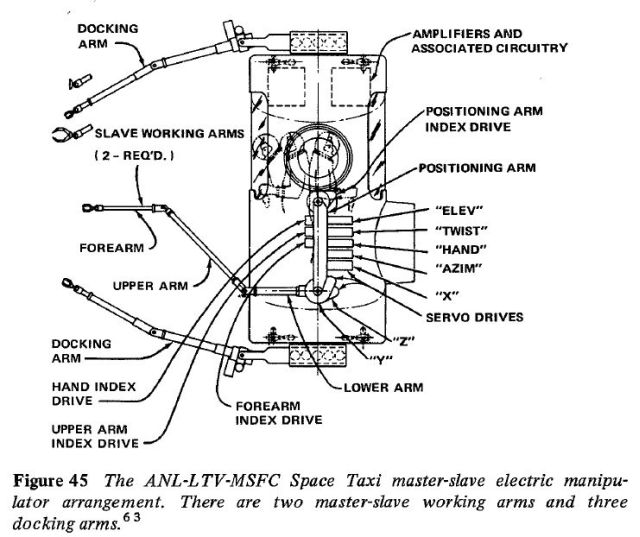
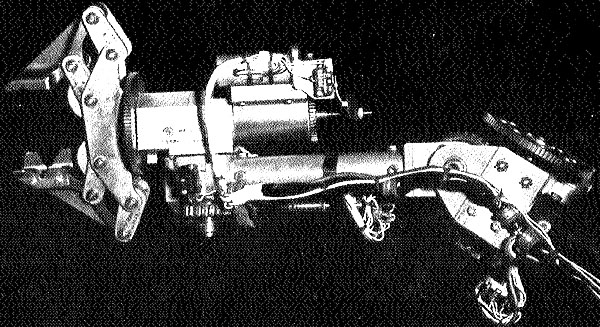
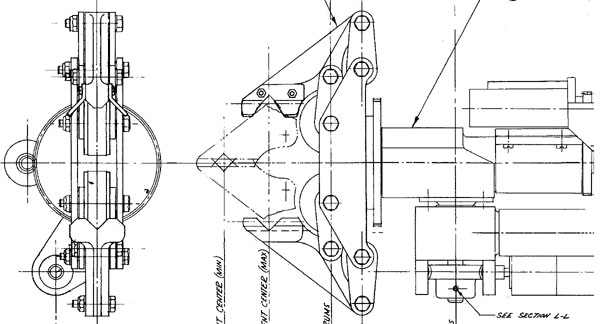
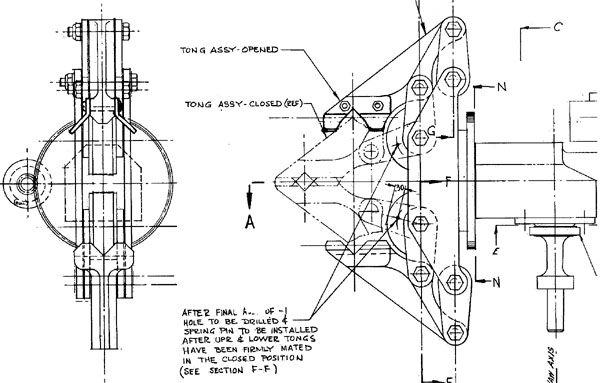
Grappler layout and prototype.
Images sourced from here as original pdf currently unavailable.
See related LTV Space Horse here.
See other early Teleoperators here.
See other early Lunar and Space Robots here.