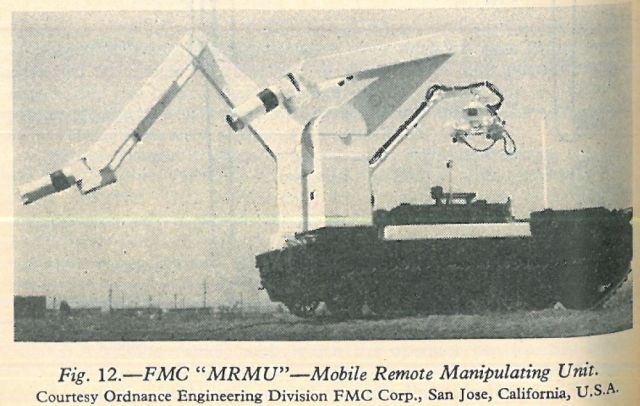
1963 – "MRMU" Mobile Remote Manipulating1 Unit – FMC Corp.
MOBILE REMOTE MANIPULATOR1 UNIT
It is recommended that the Mobile Remote Manipulator Unit (MRMU) be selected for study in Phase I as the basic recovery system. This unit, as developed by the FMC Corporation for the Research and Technology Division, Air Force Weapons Laboratory, New Mexico, has been thoroughly tested and evaluated, and can be made operational. Coupled with additional specialized tools, devices, and casks, the MRMU can perform the major portion of the recovery tasks that can be described at present.
The main design feature of this system is that the basic manipulator and its carrier can be standing by close to the launch pad while the emergency system operators are located in a central van somewhere close to the LCC. The system was conceived to provide a safe environment in which the operators can perform the necessary control and operation tasks in order to conduct recovery and salvage operations involving a hazardous environment. The prime design requirement for this system is the removal of a radioactive source from the wreckage resulting from a major conflagration. The performance of such tasks requires rugged manipulators, a means of transporting the manipulators, a remote viewing system, and an operator's remote control system.
The MRMU manipulators can be extended to a radius of 19 ft from the shoulder. This permits the hand to work 25 ft above or 8 ft below ground level. Maximum capacity is 600 lb in any direction. The jaw can grip a 5-in. object with a force of 2,500 lb.
The mechanics of the manipulator permits changes in radius, elevation, and azimuth and allows pitching, yawing, and rotation of the hand about the wrist. Shoulder, elbow, and wrist joints are mechanically programmed so that a change in radius is a primary motion rather than the result of individual joint movements.
A joystick is used to control each manipulator. When the operator moves the joystick, the manipulator hand moves correspondingly. Displacement of the joystick from its neutral position generates velocity commands. The available range of velocities is sufficient to satisfy operational requirements. Thumb-operated push buttons control the hand extension and the jaw.
Vehicle control is performed by another joystick. Motion of the joystick away from the operator controls vehicle speed; motion toward the operator controls the brakes; and motion to the right or left steers the vehicle. Push buttons operate the transmission, lights, etc.
The MRMU carrier, an XM474E2 type previously developed as a carrier for the Pershing Missile System, is used for transporting the MRMU manipulator arms. The vehicle is capable of fording streams, of extended cross-country travel over rough terrain, and of high-speed travel over improved roads and highways. The nature of the vehicle's carrying space allows it to be adapted to a variety of transportation requirements. It is a member of the airborne multipurpose vehicle family developed by the FMC Corporation.
Principal suspension and power-train components are identical to those of the M113 armored personnel carrier (the basic vehicle in the airborne multipurpose vehicle family). The normal XM474E2 control system was modified for remote operation in its use in the MRMU system.
TELEVISION SYSTEM
As the MRMU is operated remotely, a four-channel television system provides the operator with the information needed to control the MRMU. Four cameras are mounted on a pan/tilt platform which is attached to a boom that can be elevated and rotated.
Two cameras are used to produce a three-dimensional view of the forward field of vision. The two pictures are merged at the control console to provide the operator with depth perception. The remaining cameras provide a view of the peripheral field.
Note: Different references have different spellings, either "Manipulator" or "Manipulating". Which is correct?
Mobile Remote Manipulator Unit (MRMU), built for the U.S. Air Force, consists of a remotely controlled tracked vehicle on which are mounted two manipulator arms. The remote control station is a van which may be located up to a mile away. The vehicle permits an operator in a safe environment to accomplish recovery and salvage operations in a hazardous environment. Control signals are multiplexed and transmitted over an FM modulated microwave link. Feedback and visual, through the use of four TV cameras arranged to give a three-dimensional display to the operator for depth perception. The TV signals are transmitted from the manipulator to the control van via an FM modulated microwave link. See Fig 16-13 above.
Electrical actuators (motors, solenoids, linear actuators) up to 1 hp are controlled by the MRMU servo system. Those actuators associated with the manipulators are the final power elements, with those associated with vehicle control are pilot devices for the mechanical traction and steering systems.
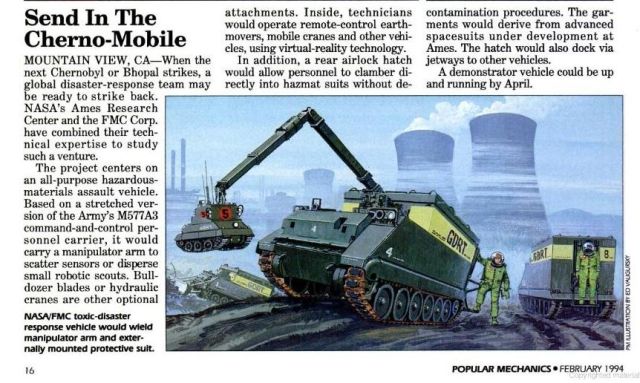
In 1994, Popular Mechanics (February issue) published an article of a study into a similar concept to the MRMU, again by FMC Corp. and NASA Ames research Center.
See other early Teleoperators and Industrial Robots here.