Hughes Space Mobot concept.
John W. Clark, Ph.D.
NUCLEAR ELECTRONICS LABORATORY
HUGHES AIRCRAFT COMPANY
CULVER CITY, CALIFORNIA
ROLE OF REMOTE HANDLING IN SPACE [c1962]
Orbiting Vehicles
In connection with orbiting vehicles, remote-handling techniques can advantageously be
employed in connection with maintenance and repair, assembly in orbit, and personnel transfer.
Maintenance and repair is, of cause, confined to orbiting vehicles so expensive as to justify the cost of orbiting a repair system rather than orbiting a complete new satellite.
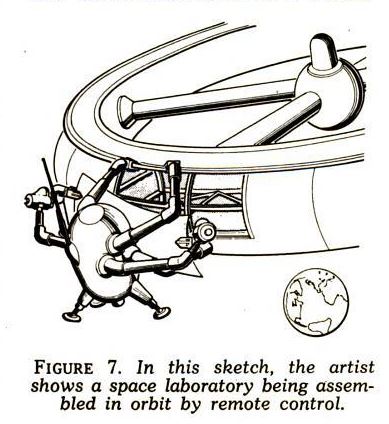
Assembly of large orbiting vehicles may advantageously be accomplished by remote-control techniques. These techniques will permit the assembly of vehicles far too large to orbit in a single payload. Control of the assembly system may be accomplished either from a ground station or from a manned orbiting vehicle.
Personnel transter, as, for example, between a re-entry vehicle and a manned space station may be facilitated by those of remote-control techniques in accomplishing the final contact between the two space vehicles and to accomplishing an airtight closure or junction between these two which will be safe for personnel transfer.
Lunar Applications
Remote-control techniques will find many applications in the exploration and development of the lunar surface for scientific and military purposes. Preliminary operatiins will probably be accomplished by systems committed from the earth. This maybe followed by development of luna sites, also by earth-controlled vehicles.
After the development of lunar sites, manned lunar expeditions may become feasible. Such expeditions will benefit from the availability of sophisticated remote-handling vehicles which can, under control of the pilot of the space ship, accomplish lunar exploration or advance the development of the sites prepared by the earth-controlled Mobots.
Finally, after habitable lunar stations become available, operations of all kinds upon the lunar surface will still be in large part carried out by Mobots under control of the inhabitants of the lunar station.
DESIGN OF REMOTE-HANDLING SYSTEMS FOR SPACE
This discussion excludes consideration of lunar Mobots. It is, of necessity, confined to certain of the problems uniquely applicable to remote handling in connection with orbiting space vehicles.
Vision
The meet important of the senses, vision, requires particular consideration under space conditions. The harsh illumination will require unusual control of the TV cameras, and also may require specially conrolled illuminations an aid to working on the shadowed side of orbiting objects. The lack of background and of vertical reference are serious psychological problems. Consideration may well be given to artificially inserting both background and vertical reference within thee TV system so that the operator's TV monitors present him information similar to that to which he is accustomed.
These requirements are superimposed upon those applicable to any remote-handling system. Sufficient experience has now been gained with operation of Hughes Mobots to make one confident that adequate vision for performing complex or precise tasks can be furnished to a trained operator by the appropriate use of two or more conventional TV cameras. Additional quantitative studies concerning the relative utilily of multi-camera, stereo, and other methods of vision, with specific reference to the conditions existing in space, will be most valuable.
Dynamics of a Gravity-Free Environment
Operations under orbiting conditions present a novel situation since on is concerned with acceleration rather than velocities and a relatively small system of limited power consumption can direct the motions of quite heavy objects if appropriate consideration is given to their inertia. For example, an arm capable of lifting an earth weight of 40 pounds can impart a useful acceleration to much heavier masses under weightless conditions. This arm can move a 500-pound mass 5 feet in 2.8 seconds in an optimal situation in which a mass is accelerated for one-half the time and decelerated for one-half the time. Clearly, spacial operator training will be required to obtain successful performance under these conditions, so different from those to which we are accustomed.
Command and Data Link
In cases in which control is provided from a manned space craft, the command and data link can be transmitted from controlling vessel to Mobot via cable. The time division multiplex command system utilizing trinary digital coding is particularly suitable since it requires only two conductors in the cable. This system has been described in detail in an article by Don A. Campbell (ref. 1). Situations in which radio command is required are also well handled by this same system, which minimizes bandwidth required of the communication channel. The data link which conveys vision, sensory, and other analog information from Mobot to command station can employ the same cable as does the command link. In radio-controlled systems a separate data link is required. The detailed considerations, primarily the trade-offs between power and bandwidth, are different in each case. Particular attention must be paid to utilizing TV systems in which minimum video bandwidth is required in comparison with the conventional RTCA• standard system which is quite wasteful of bandwidth.
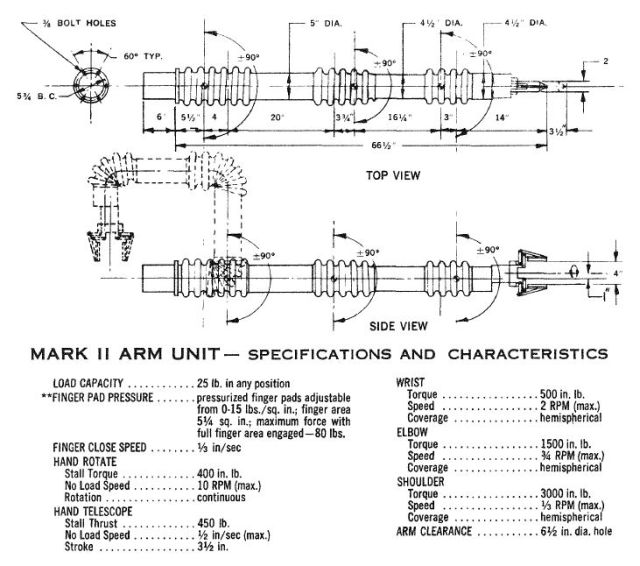
Arm Geometry
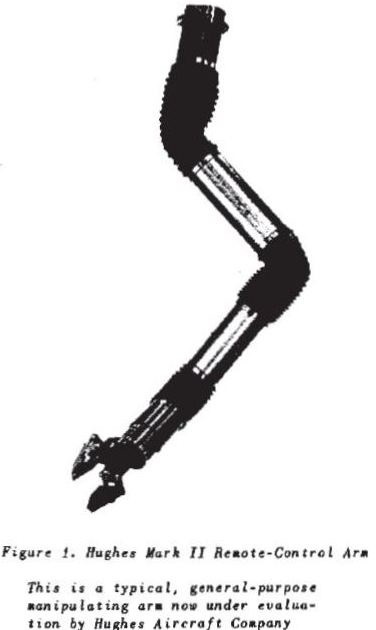
Numerous space applications are best handled by specific mechanisms tailored to perform specific tasks. No general comments can be made about such mechanisms. There is, however, a definite need for general-purpose handling mechanisms. To meet this need, the Hughes Mark 2 Arm has been developed (figure 1). Its three articulations are each capable of +-90deg motion in either plane. The tong rotates continuously. Its parallel jaws open to a 4-inch width or close completely. They will rotate continuously in either direction. This arm is completely self-contained. All actuators and other mechanisms are included within the arm structure. The only auxiliary space required is that occupied bt the command system. This arm is not presented as the ultimate arm design, but is presented as indicative of a general-purpose arm capable of handling a wide variety of manipulative requirements in the presence of obstacles or in cramped quarters.
• Radio Technical Committee for Aeronautics
Locomotion
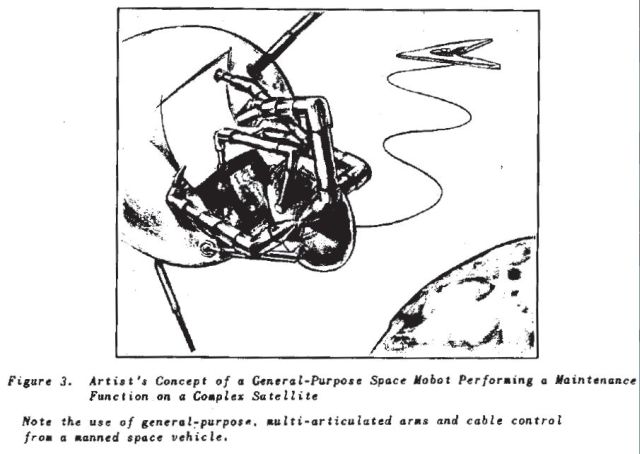
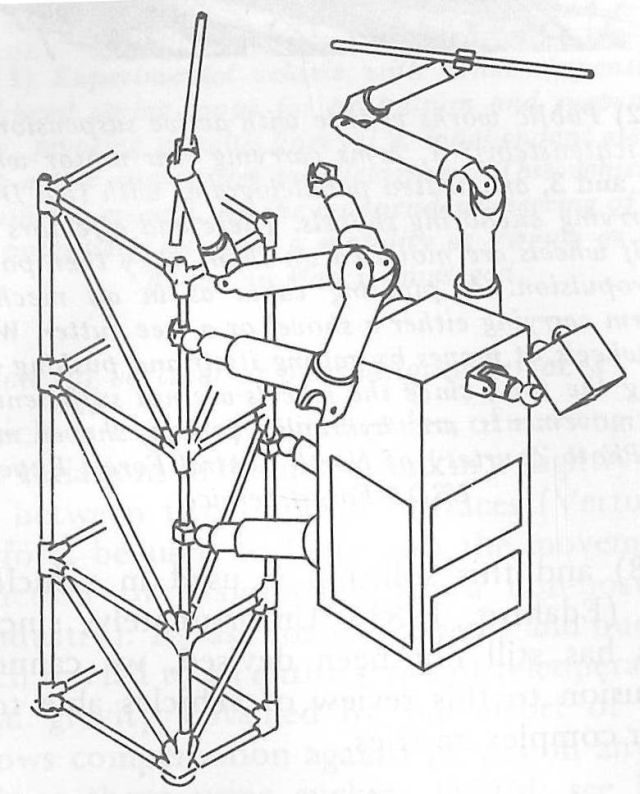
In connection with satellite and orbital vehicle handling arms, only two methods of locomotion appear feabible. These are rockets or jets for traversing the space between one orbiting object and another, and auxiliary arms for moving about on or in a large orbiting vehicle. The preliminary sketches of space Mobots (figures 2 and 3[7]) indicate a four-armed Mobot based on this concept. In general, two of its arms are employed for moving it about in connection with its operations on a orbiting vehicle, while the other two are free for performing any manipulations required.
The Space Environment
The space environment (high vacuum, extremes of temperature, zero gravity, etc.) will have controlling influence to the detailed design of the components which make up any space Mobot. Fortunately, adequate design information is becoming available upon which one can base such engineering design. Further environmental test facilities are becoming available in which components or complete systems can be tested to insure their performance in the space environment.
SUMMARY
Concepts
The above discussions of the role of remote handling in space leads to the preliminary concepts shown in figures 2 and 3[7]. These Mobots employ jets or rockets to move about in space. They are furnished with four ams and two "eyes." The four arms, which are identical, can be utilized for moving the Mobot about on the vehicle on which it is working, positioning it during performance of the task, or guiding or manipulating the objects handled. Even a relatively small Mobot, such as those in figures 2 and 3[7], can handle quite heavy objects in space if the operator is properly trained in the dynamics of space operations as outlined in the above discussion of the gravity-free environment.
These Mobots may be controlled by cable from a manned space ship or from a ground station by radio beams. In the latter case, it may be necessary to utilize orbiting vehicles as relay points for control of Mobots which do not stay within the visual horizon of any one ground station.
CONCLUSIONS
The work performed to date at Hughes on the electronically controlled remote-control systems to perform complex operations has demonstrated the feasibility of this method of accomplishing useful work an a hazardous environment. Work now in progress demonstrates the feasibility of designing mechanical and electronic structures which will perform in a satisfactory manner in the environmental conditions which prevail in space. Space MOBOTS are technically feasible and can be engineered economically and effectively to accomplish any given tasks which may be placed upon them by our Space program,
REFERENCE
1. Campbell, D. A., "Multiplex Circuits for Control of a Robot," Electronics, 22 January 1960.
From 1960, Ray Goertz, who invented electrically remote manipulators for the nuclear industry, together with his team at Argonne Nuclear Laboratories (ANL), were engaged by NASA to specify teleoperator configurations for the Lunar space program. The result is illustrated above.
It should be noted that floating vehicles share one problem. This is their inability to stay immobile relative to the object on which they must act. Hence, they are equipped with docking arms, other than the manipulator(s) directly intended to execute the task, to attach them to the object of their task, whether this is another satellite or an underwater oil platform.
Most of the Hughes Aircraft Mobot concepts were based around the Mobot Mk II arm.
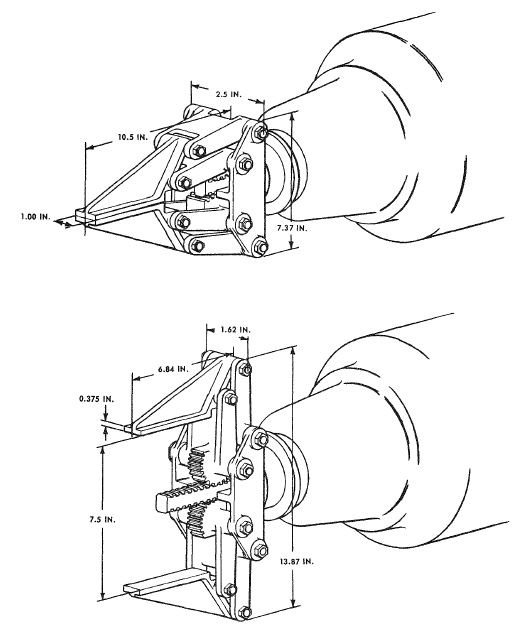
Mobot Gripper specification.

Dr. John W. Clark, Manager of the Nuclear Electronics Laboratory at Hughes Aircraft Corporation, headed the Mobot group.
See other early Teleoperators here.
See other early Lunar and Space Robots here.