NORTHROP CORPORATION
NORAIR DIVISION
HAWTHORNE, CALIFORNIA
INTRODUCTION
Participation in various system studies concerned with space and extraterrestrial environments has developed within Northrop Corporation, Norair Division, an acute awareness of the requirements for extra-vehicular protection of personnel in these unfriendly environments. This awareness has led to classification of work environments, anticipated tasks, and consideration of remote-handling solutions to special problems. The resulting remote-handling concept runs a gamut of complexity from manned to unmanned devices. The Northrop approach to remote-handling equipment is summarized in figure 1.
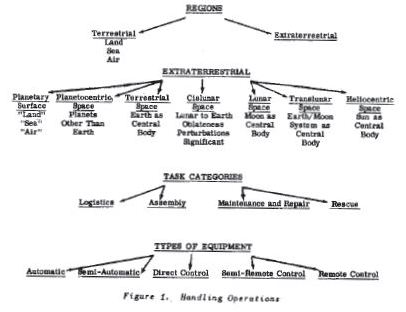
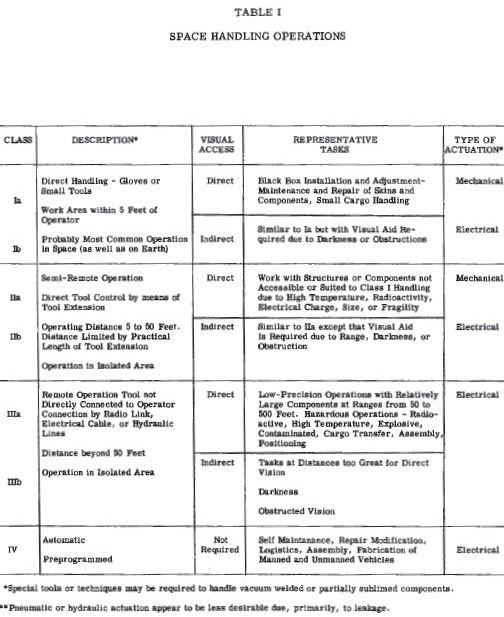
The individual factors are more completely defined in table I.
PRINCIPAL DESIGN CONSIDERATIONS
The following design considerations for both the overall system, the remote-handling systems, and other subsystems directly affect the requirements for remote-handling equipment:
System Compatibility
Vehicles, subsystems, and components must be designed to be compatible with the handling system to insure that it is possible to:
a. Minimize the number and types of tools required
b. Minimize the number of operations required to install, remove, and replace test
and checkout equipment, etc.
c. Minimize the force required for tool effectiveness
Visual Presentation
It is essential that the task area be visible to the Operator either through:
a. Direct view, or
b. Visual aids (optical system, electronic system)
Ease of Operation and Maintenance
As with any system for use in connection with space operations, it is mandatory that the system require minimum maintenance and easy operation. This then requires factors of:
a. High reliability
b. Adequate operator restraint for extra-vehicular operations
c. Balanced forces and masses for minimum perturbations
Environmental Protection
Extra-vehicular operations may require special protection devices such as:
a. Sunshades
b. Meteor screens
c. Inflatable structures
d. Furiable structures
PROBLEMS OF EXISTING MANIPULATORS
The human engineering problems associated with remote manipulators are numerous and difficult. Experience generally suggests three major problem areas where research efforts may be most profitable:
Feedback
Many of the manipulator problems may be traced to either a lack of, or an inappropriate, feed-back arm or grasping mechanism. In the "natural" setting, an operator may use any one or a combination of his senses to obtain the necessary feedback information. However, when the operator uses existing remote manipulators, the distance to the manipulated object, the intervening manipulator mechanisms, and the "unnatural" control-display relations may place blocks or filters in the feed-back channels. Research directed toward removal of these blocks and filters or toward substitution of alternate channels appears promising. Experiments are now being conducted on a method for providing actual feedback for manipulators. Tentative research suggests that back pressures or kinesthetic feedback on control arms may not be required for all the degrees of freedom.
It appears very difficult to give the operators direct analogy of the qualities of texture and temperature. Assuming that research analysis shows these qualities are necessary, further investigation may be pursued toward using alternate feedback channels. For instance, research has shown the feasibility of using an auditory feedback which gives an indirect indication of texture and temperature.
A great deal of data is available to establish and identify the role of vision and visual feedback in the performance of manual tasks. It is important that the design of manipulators be such that the necessary visual functions are included. Hence, the human factor problem area is not the redefinition of well established visual requirements but rather the determination of the effects of the various restricting factors associated with manipulators, such as distance, optical limitations, etc.
To illustrate, the stereoptic visual function required for various manual tasks is well established. However, stereoptic cues diminish rapidly with distance, become distorted with most optics, and are difficult to maintain with existing stereo-television systems. A series of investigations and experiments has been conducted to develop a stereoptical rangefinder with television which may be applied to providing stereopsis for manipulator use.
The human engineering problem area with respect to other senses is somewhat different from that for the visual or kinesthetic and tactical feedbacks. For these other feedback senses (i.e., auditory, olfactory, etc.), two research needs are prominent. First, more information will be needed on the roles which these other senses actually play in manipulative tasks. Second, more information will be needed on the roles these senses can play. To illustrate the first, it might be asked just how important is it for the manipulator operator to hear a bolt tightening? The second might be illustrated by asking what are the limits of a blind man's auditory information?
Manipulator Strength, Dexterity, and Mobility
This second major human engineering problem area is concerned with the strength, mobility, and dexterity requirements of the man-manipulator subsystems. There are two major phases to determining these human engineering requirements. The first is the need for gathering and classifying basic data through function and task analysis methods. The second into consider and evaluate alternate methods.
Integration of Manipulator and Manipulated Objects
A third major problem area lies in the integration of a man-manipulator subsystem with the equipment on which it will be used. To date, the manipulator and its operator have had to do the job of handling items designed pimarily for manual handling and operation. Because these items were built for manual handling, the design philosophy of existing manipulators has been, to one degree or another, to try to duplicate the physical characteristics of the human. Manipulators built to this philosophy are logically limited at best to human physical limitations, and in practice, to only a fraction of these limitations. However, by designing system components for manipulator handling rather than for manual handling, the limits of the anthropomorphic approach are removed. Certain functions and tasks could possibly be accomplished more efficiently with man-manipulator subsystems than by current manual methods.
CONCEPTUAL HANDLING DEVICES
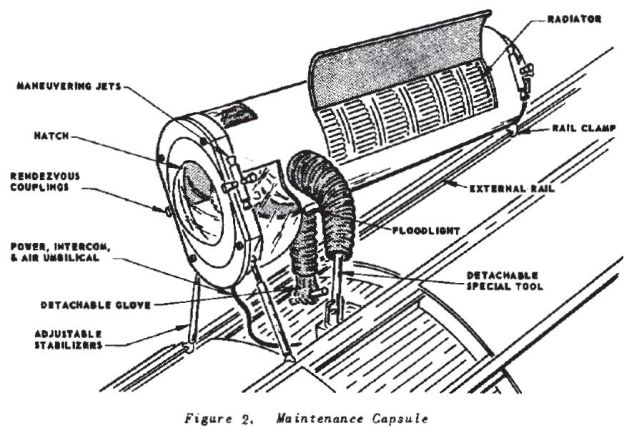
The maintenance capsule illustrated in figure 2 would give the operator a direct-handling capability by means of the gloved sleeves or detachable tools. Semi-remote handling capability would be obtained either by attaching remote-handling tools to the ends of the sleeves (in lieu of gloves) or by attaching at the capsule-sleeve interface, Further remote-handling capability would be provided by combining the capsule with an adapter as shown in figure 3.
A capsule of the type indicated would serve as a multi-purpose vehicle providing: (a) protection for personnel engaged in maintenance or repair operations, (b) an emergency escape vehicle, and (c) an emergency rescue vehicle. The capsule would consist of a multiple-walled cylinder equipped with adjustable slippers that move over a rail network on the satellite's exterior. Used in conjunction with the stabilizers, these slippers provide constraint for the capsule during translations along the surface of this satellite and stabilization during maintenance and repair operations. Maneuvering jets are provided for control during the infrequent times when the capsule would be detached from the satellite. Flexible sleeves equipped with couplings for either gloves or special tools would be located below the observation window. A spotlight for illuminating the work area is located on the chest area, and stowage facilities for parts or tools are conveniently located around the surface. The capsule would also be equipped with the systems necessary to support a man for several days. However, these systems are used only intermittently or during an emergency since the parent satellite would supply air, power, and communications through an umbilical connected near the work area.
For external maintenance operation, the occupant of the capsule would be provided with an emergency full pressure suit. The capsule is equipped with rendezvous couplings which are compatible with all of the parent vehicle's external airlocks and airtight doors. When these couplings are retracted the capsule can be taken into the satellite via the personnel airlock for maintenance and servicing of the capsule systems.
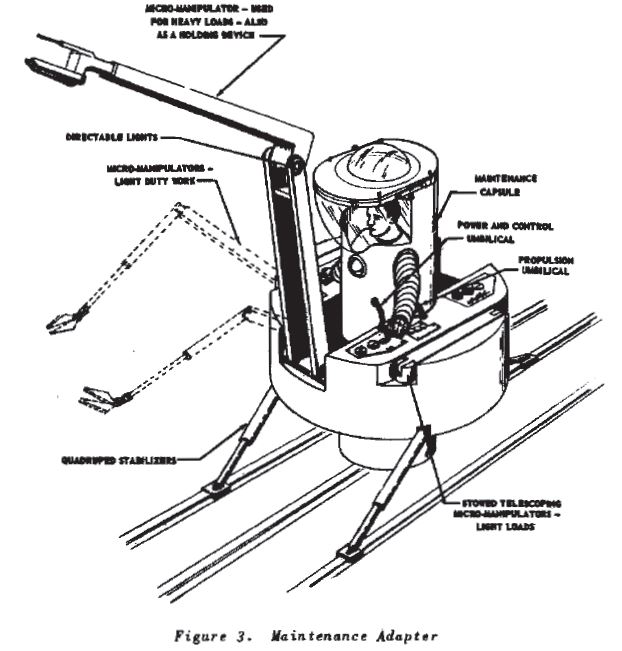
Figure 3 illustrates the adaptor concept. Here, the manned capsule shown in figure 3 is mated with the adaptor and is connected to the adaptor's systems by umbilicals. The adaptor is provided with a heavy-duty micromanipulator for handling large masses and with light-duty micromanipulators for performing more precise operations such as tuning and adjusting internal components. The device is supported by four adjustable legs which clamp to the parent vehicle's structure. Free space maneuverability is provided by the capsule's maneuvering jets. Maneuverability over the parent vehicle's structure in accomplished by sliding the adaptor along an external rail network. The capsule can leave the adaptor when the task is completed. The adaptor provides power, propulsion expellant, parts storage, a holding fixture (the heavy-duty micromanipulator) for parts being worked on by the micromanipulators or by the gloved or tooled capsule arms, and other supporting systems such as illumination, test and check capabilities, etc.
Source: "Survey of Remote Handling in Space", D. Frederick Baker, USAF, 1962
See other early Space Teleoperators here.
See other early Lunar and Space Robots here.