Preliminary Design Concepts
• Bell Aerosystems Remora Capsule
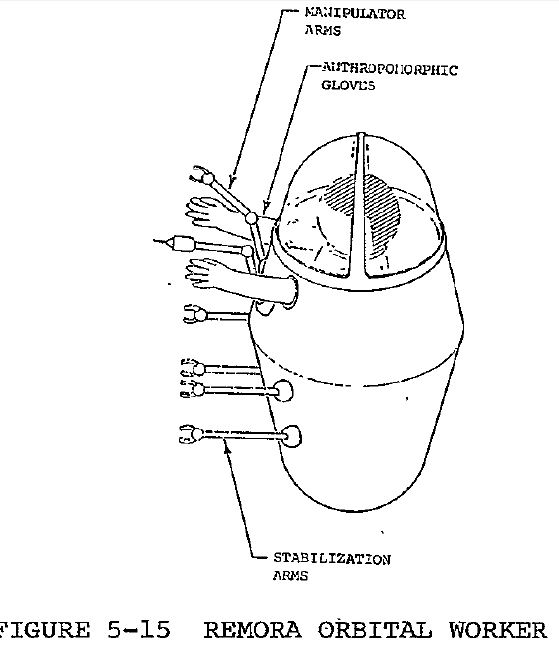
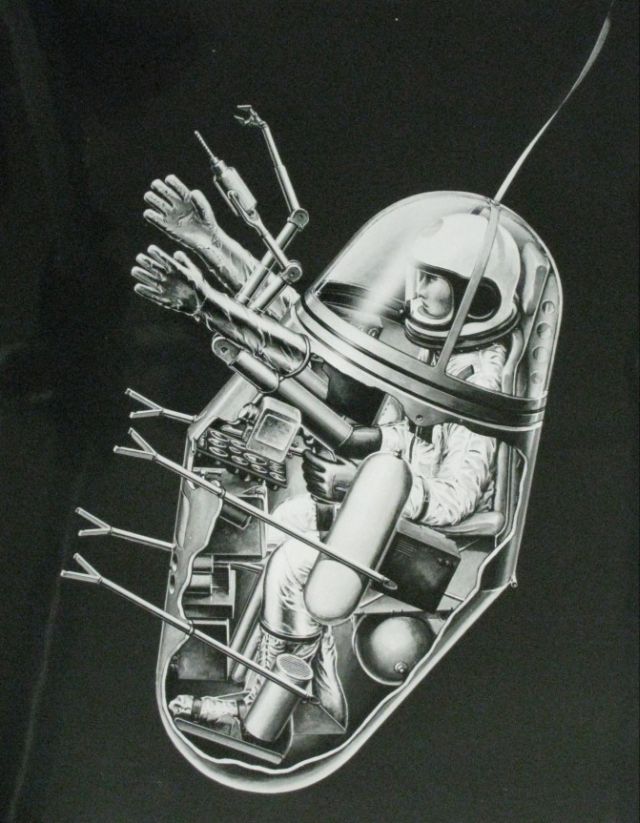
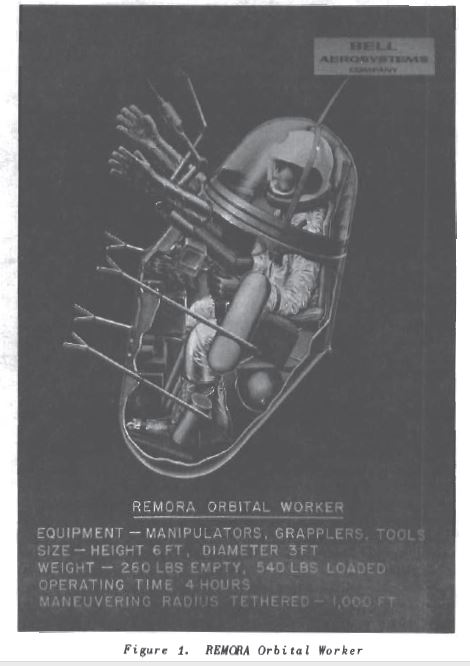
The REMORA configuration (Figure 5-15) is a small, buoy-shaped capsule 6-feet high, 3-feet in diameter, and weighing 540 pounds (leaded). This concept, proposed shout 1960, permits one astronaut to function in space while protected from the space environment. The capsule is tethered by a cable that provides power and retrieval, if necessary, and allows a maneuvering radius of 1,000 feet. A tinted dome provides access to the capsule and allows 360deg visibility. The capsule is oriented by reaction jets and has an operating time of 4 hours (a function of its life support system).
REMORA
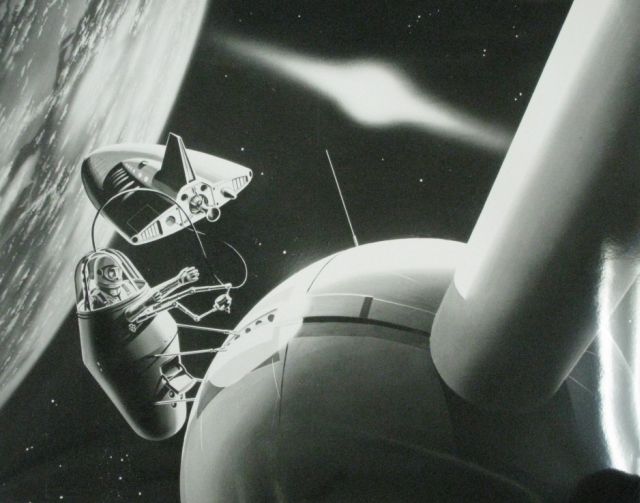
In the vacuum of outer space, Bell's Remora capsule could enable men to assemble, inspect, service and maintain satellites and space stations or shuttle men between space vehicles protected from the hazards of meteorites and radiation.
Taking its name from the fish which attaches itself to sharks, Remora is equipped with mechanical grappling arms by which it can attach itself to space stations and satellites. Inside the capsule the spaceman will have freedom to manipulate the arms to engage in assembly and maintenance activities.
Source: Space Research: Directions for the Future, Part 1.
Nonanthropomorphic maneuvering units.
As early as 1960, Bell Aircraft Corporation proposed the REMORA system, which combines direct and remote manipulation. The REMORA concept (see above) appears to offer several advantages. First, if necessary, it could be shielded to protect the extravehicular worker in zones of high radiation. Second, a variety of arms may be used, each designed to serve a special type of operation. For example, one pair of arms might be of the gauntlet type for use on jobs requiring delicate manipulation. One arm might hold and provide power for tools such as drills; other arms might simply hold the work, leaving the operator's gauntleted hands free for productive work. (Industrial engineers tell us that the "hold" operation is probably the greatest source of inefficiency in assembly and maintenance operations.) The possibilities are almost infinite. Third, REMORA is pressurized, requiring the operator to inflate his suit only in emergencies. This feature would greatly reduce fatigue and extend useful time of work.
See other early Teleoperators here.
See other early Lunar and Space Robots here.