1960 – KOELSCH Mobile Manipulator
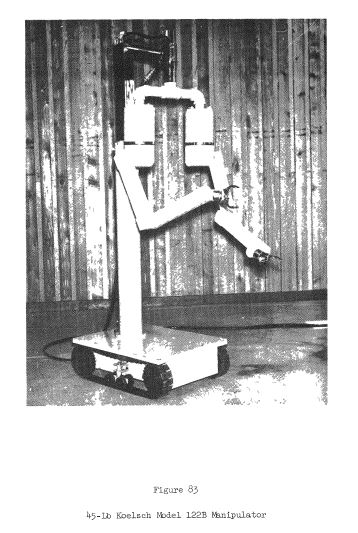
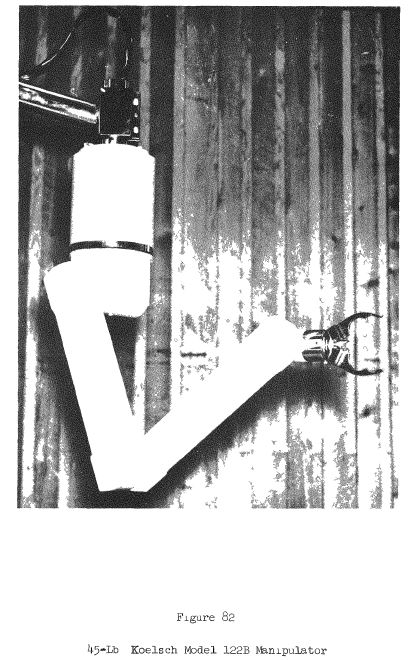
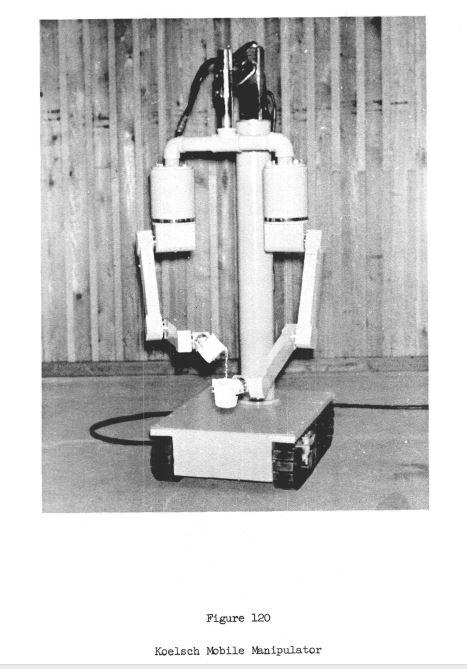
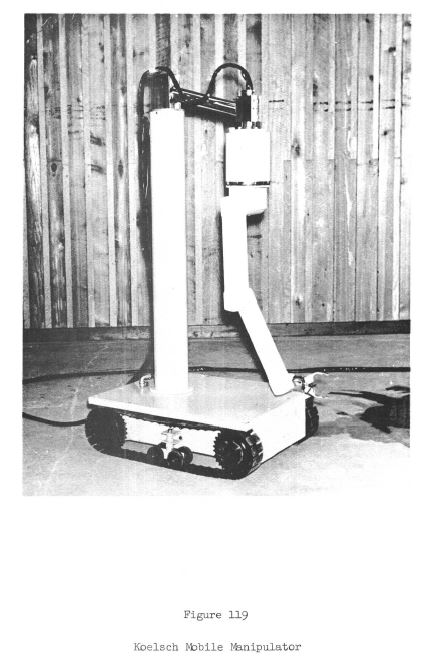
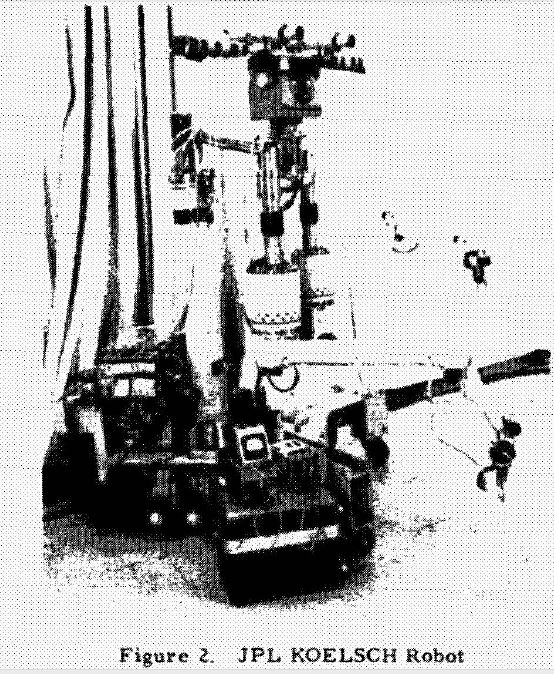
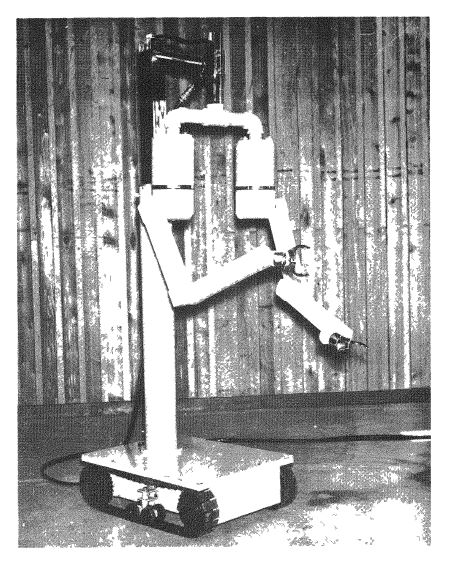
The JPL KOELSCH Robot system (Fig. 2) contains two identical arms mounted on a common shoulder link supported by a vertical post. The post is fitted to a small tread platform. The common shoulder link can be rotated about and raised along the vertical axis of the post. Relative to the common shoulder link, each arm has six basic motion capabilities (six degrees-of-freedom): horizontal shoulder rotation, vertical shoulder swing, vertical elbow swing, vertical wrist swing, head rotation, and hand grip. All joint motions are independent and can be operated individually or simultaneously in any direction. The servo system has both manual and computer control modes. The manua; control is conventional rate control for each joint drive. The computer provides position control, but the drive servo loops are analog. Manual and computer control modes of operation are mutually exclusive. For remote control experiments, the Koelsch manipulator is equipped with the dual TV system mounted on the common shoulder link. The TV base has pan and tilt mechanisms. The identification of object coordinates is performed by the use of a curson in the video display frame. Several sets of control experiments have been performed using the JPL KOELSCH Robot arm also using proximity sensors in both manual and computer control modes.
Source: JPL Technical Memorandum 33-721. Jan 1, 1975
There is also a paper on this Mobile Manipulator: MOBILE MANIPULATOR, J. A. Brown, Esso Research and Engineering Company, Linden, New Jersey, William A. Koelsch, Jr., Koelsch Electronic Development Company, Boise, Idaho (USA)
See other early Teleoperators here.