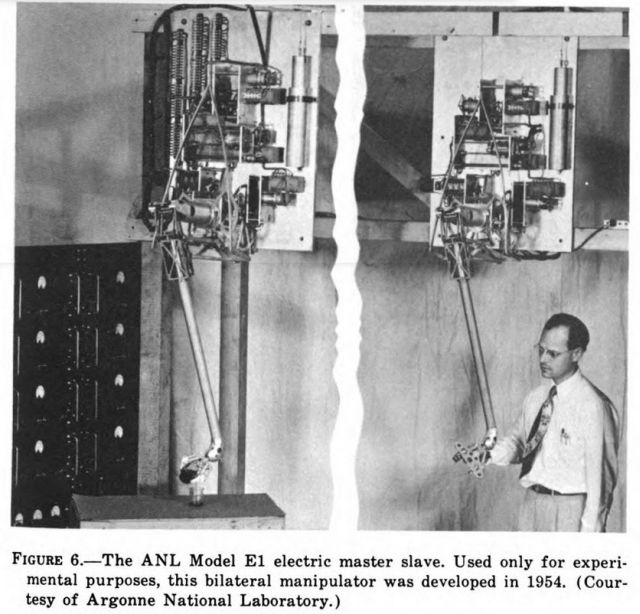
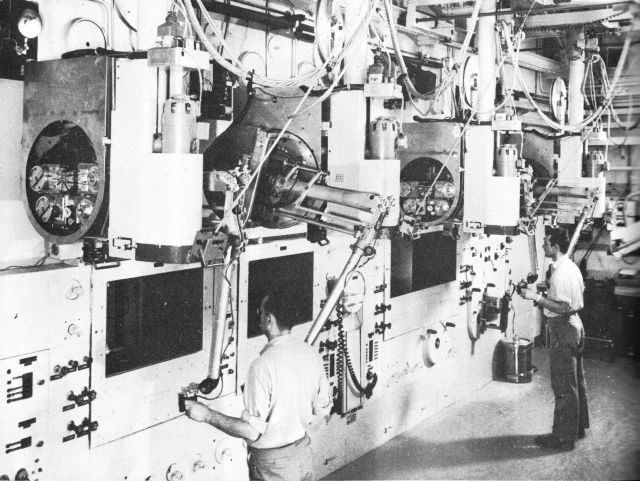
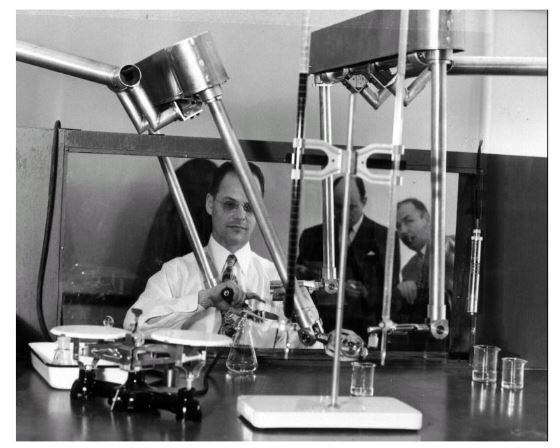
1954 – ElectroMechanical Manipulator by Ray Goertz (pictured)
An early experimental model – this one also showing the head-mount camera controller
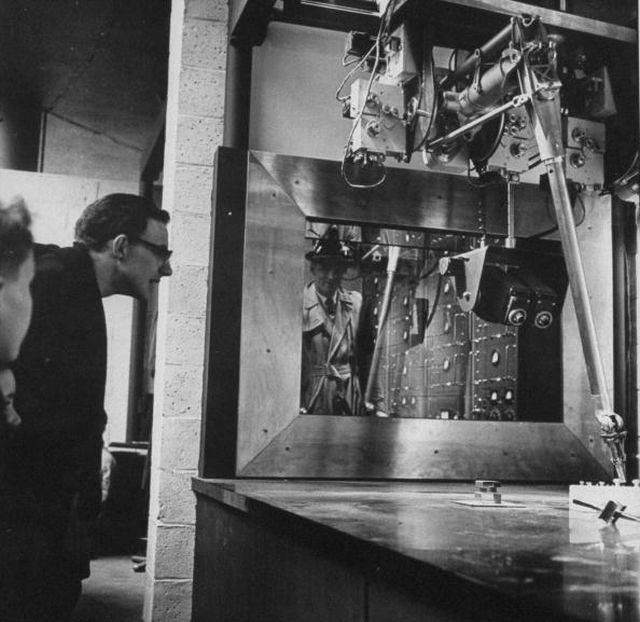
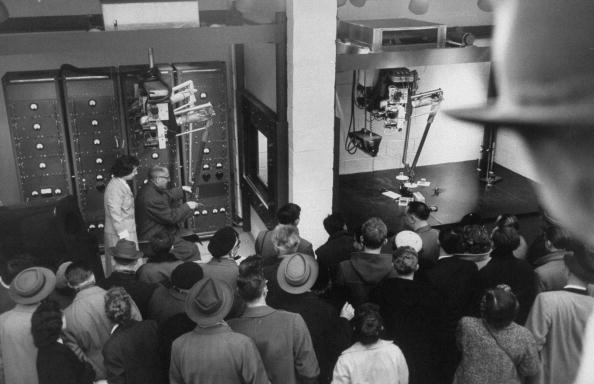
Brussels Exhibition – US Pavillion demo.
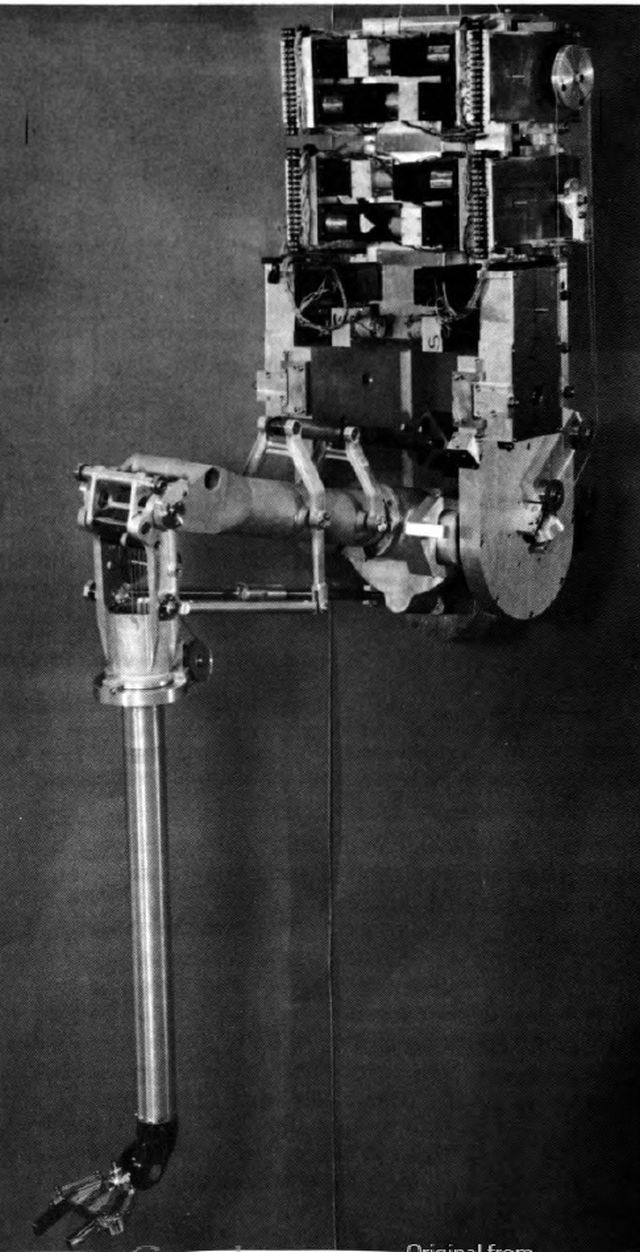
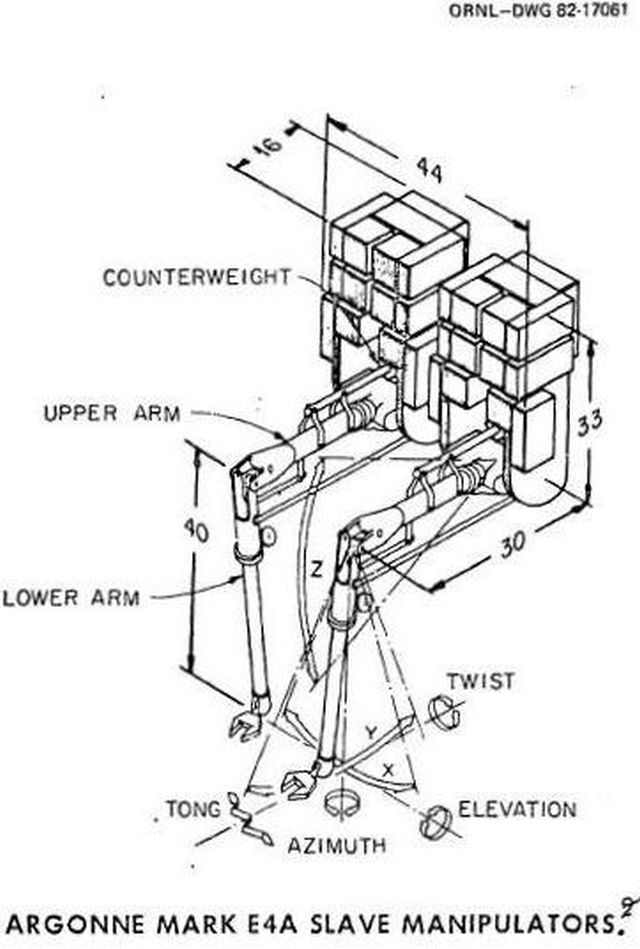
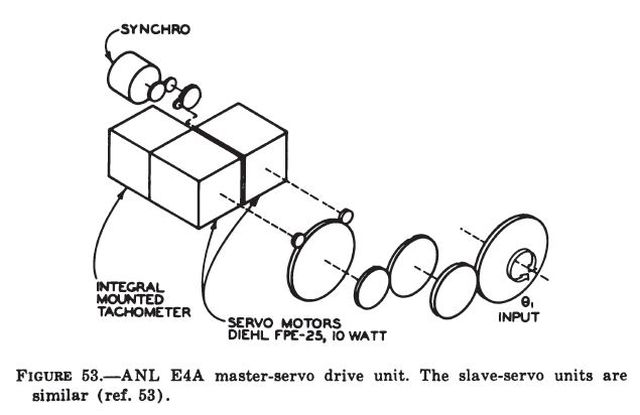
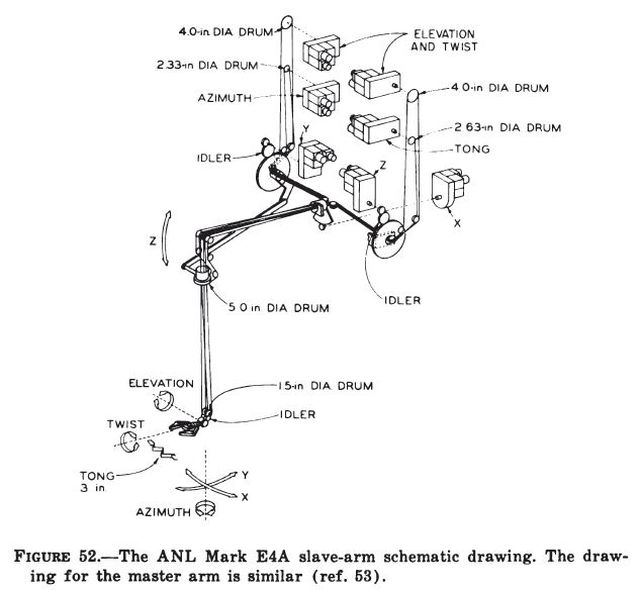
Model E4a Slave unit.
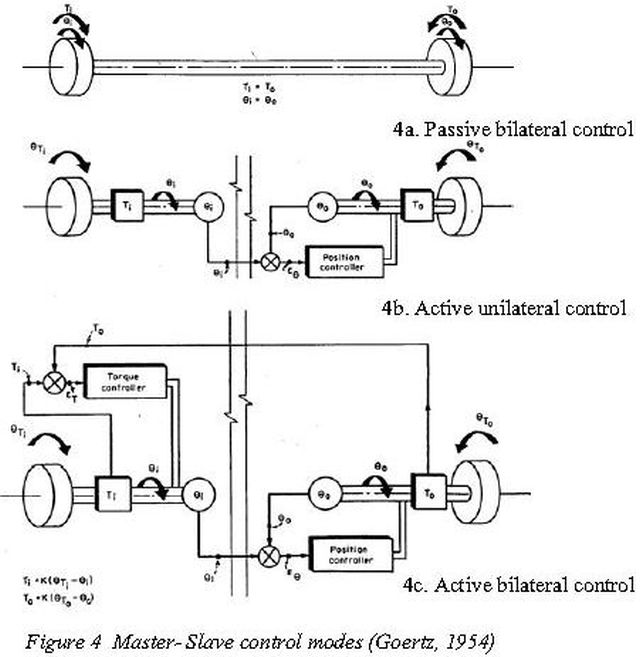
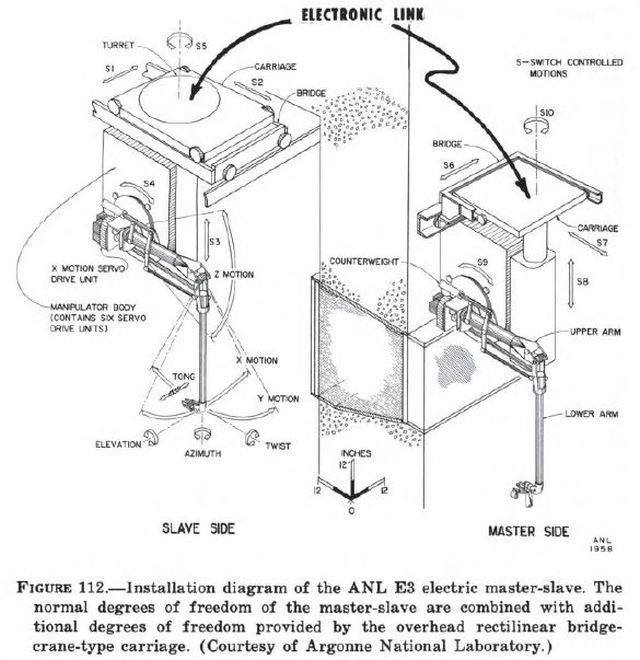
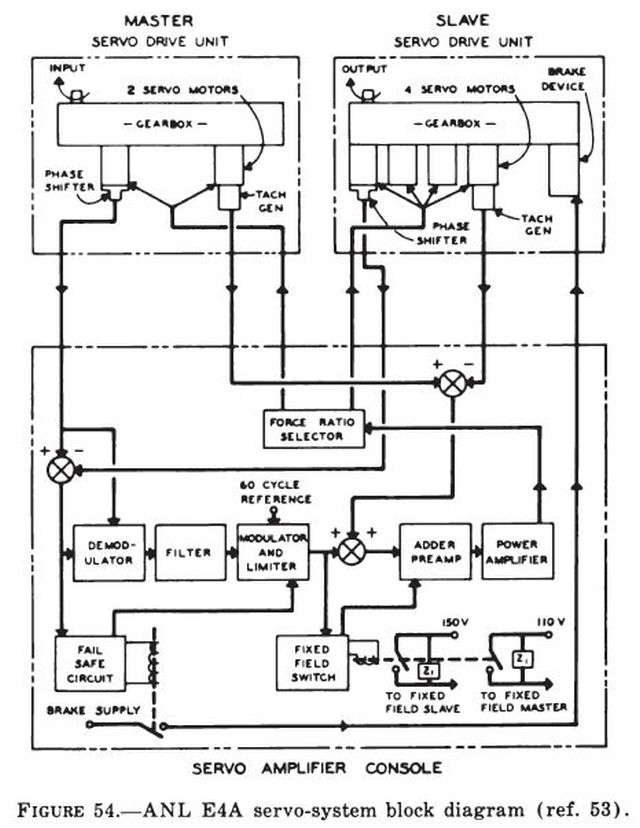
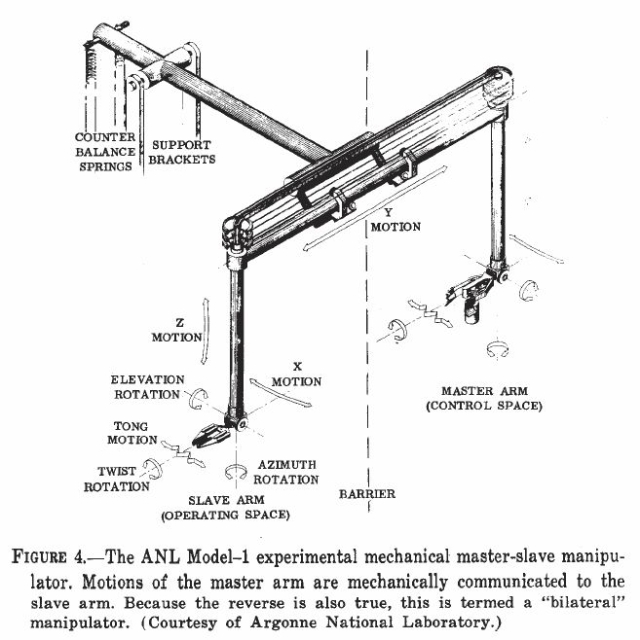
Diagram by Goertz showing the various control modes of Master-Slave arms.
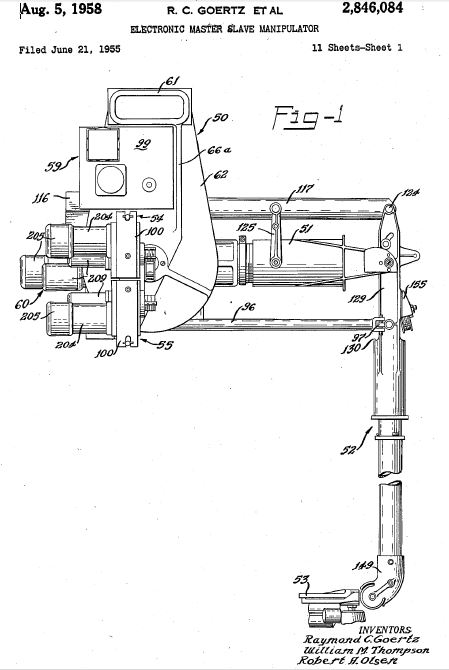
Patent information:
Publication number US2846084 A
Publication date Aug 5, 1958
Filing date Jun 21, 1955
Inventors Goertz Raymond C, Olsen Robert A, Thompson William M
Original Assignee Goertz Raymond C, Olsen Robert A, Thompson William M
Historical Significance:
Goertz first described the force reflection manipulator in 1952 – Goertz RC, ‘A force reflecting positional servo mechanism’, Nucleonics, Vol 10, Part II, pp43-45, 1952. Other remote manipulator systems of the time were either mechanical, hydraulic, or electro-hydraulic, needing to be closely coupled. Sixty years later we are still seeing ideas that this invention spawned. Ideas such as telepresence in areas such as underwater and outer-space.
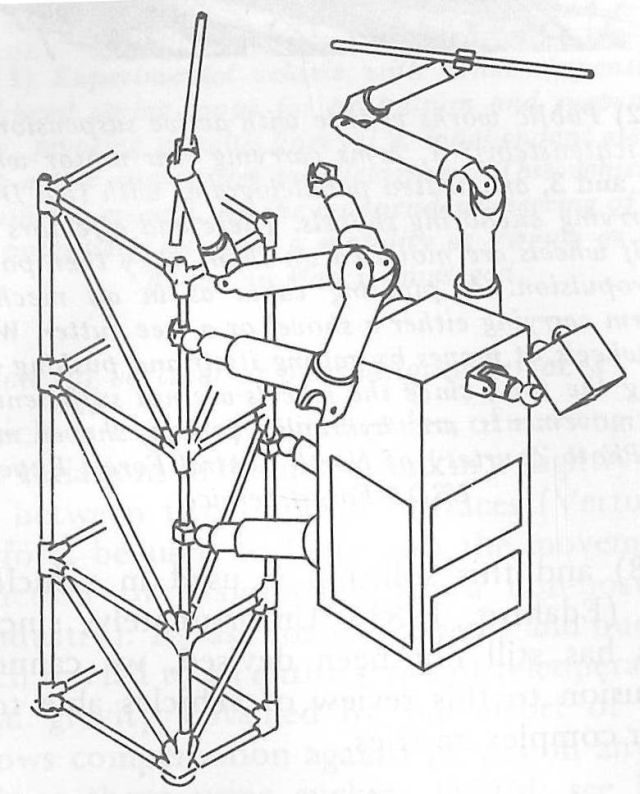
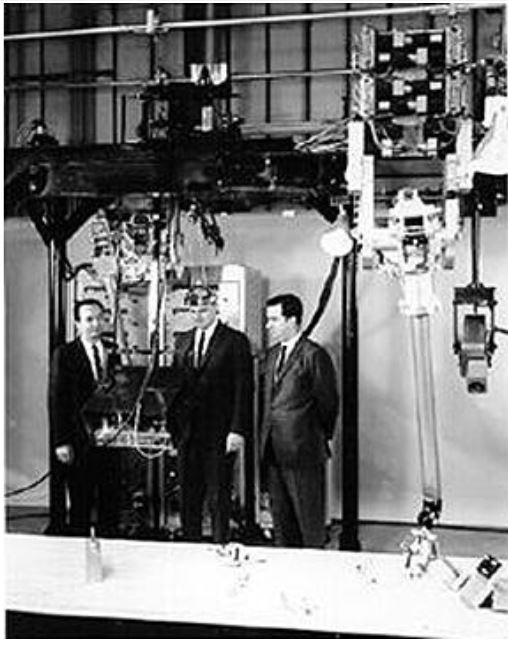
From 1960, Ray Goertz, who invented electrically remote manipulators for the nuclear industry, together with his team at Argonne Nuclear Laboratories (ANL), were engaged by NASA to specify teleoperator configurations for the Lunar space program. The result is illustrated above.
It should be noted that floating vehicles share one problem. This is their inability to stay immobile relative to the object on which they must act. Hence, they are equipped with docking arms, other than the manipulator(s) directly intended to execute the task, to attach them to the object of their task, whether this is another satellite or an underwater oil platform.
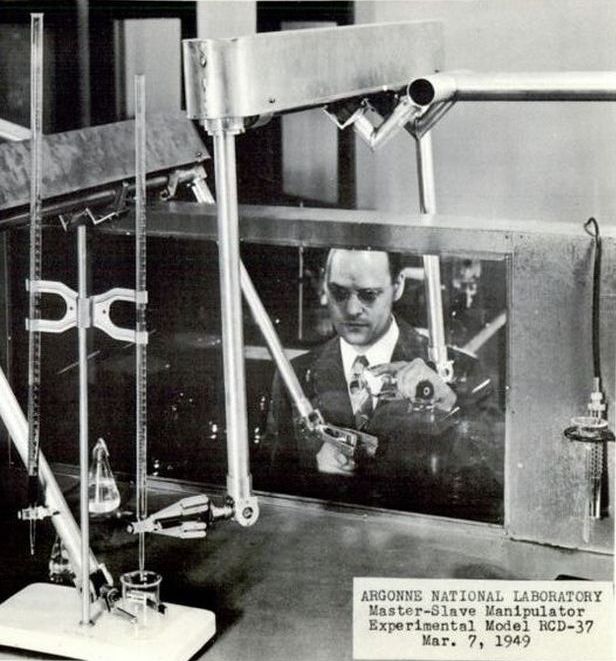
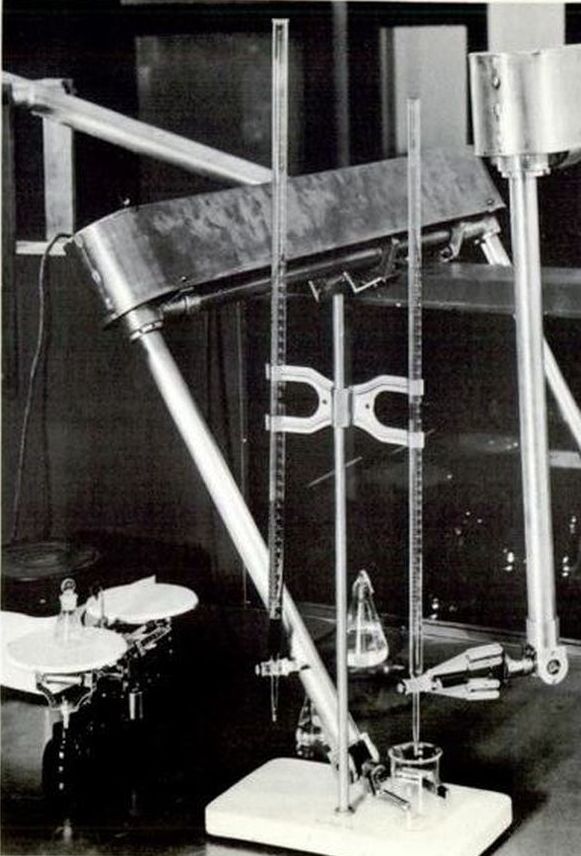
Earlier 1949 Mechanical Manipulator by Goertz.

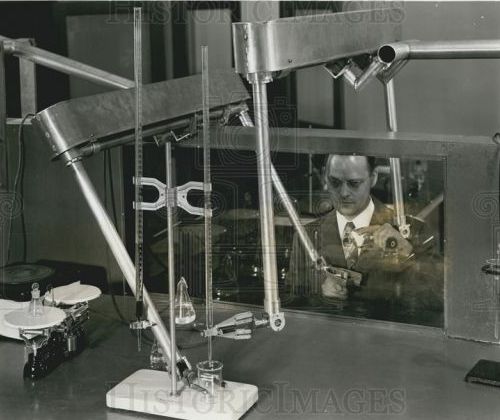
Ray Goertz with his prototype manipulators.
See other early Teleoperators, Exoskeletons and Industrial Robots here.