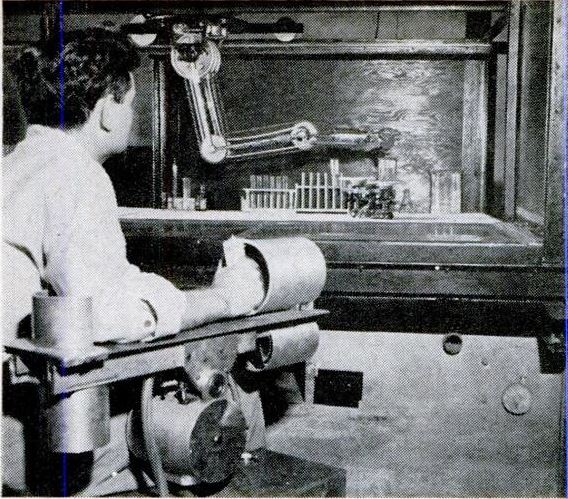
Several feet away, the operator controls the arm from this chair.
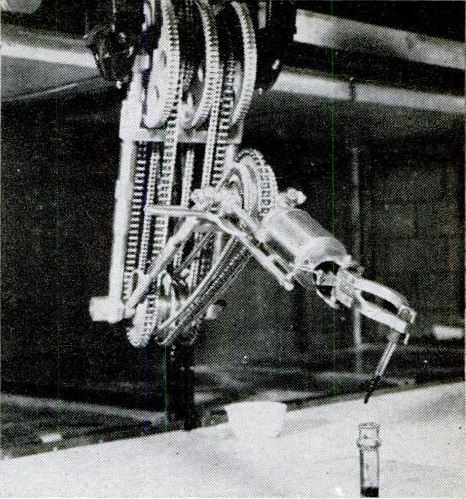
It can measure out liquid by the drop.
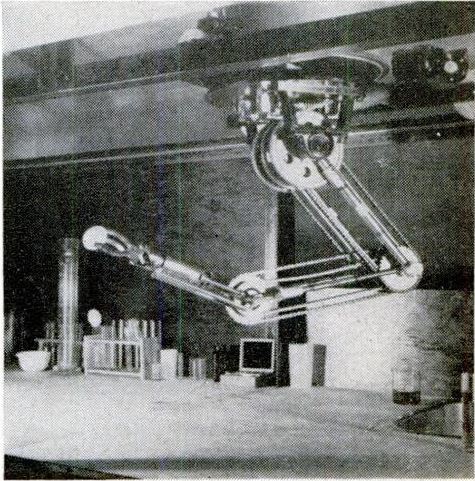
"Adelbert"—Science's "Right Arm"—Can Even Write Its Name
ALTHOUGH it looks more like a dentist's oversized drill, a gentle-acting mechanical arm called "Adelbert" is actually built like the human arm. It has an elbow, shoulder, wrist and fingers. Unlike normal arms, it is completely double-jointed.
Adelbert's inventor is Art Youmans, who works for a Tulsa company that does radioactivity well logging in surveying oil fields. Radioactive materials often require remote handling, hence the invention of remotely operated Adelbert. Youmans spent 18 months working on his robot.
Similar arms are in use in research labs, but Youmans claims his arm is best. It is versatile. It can snatch up heavy cans or fondle eggs. It pours from slender test tubes as adroitly as a chemist. Even untrained operators can pour liquids with Adelbert and not spill a drop. A favorite trick is to pick up a pencil and write its name.
The operator sits in a one-armed chair—the arm being the control. When the operator moves this arm forward by pivoting his arm from the shoulder, Adelbert does likewise. Raise a forearm and the mechanical arm mirrors the action. A pistol-grip bar controls the twisting of the wrist. This movement even outdoes the human arm- can spin its hand all the way around in either direction. That's handy for screwing nuts on bolts. Open the fingers and Adelbert follows suit. Unaffected by radiation, Adelbert offers safety and deftness—a combination atomic researchers need.
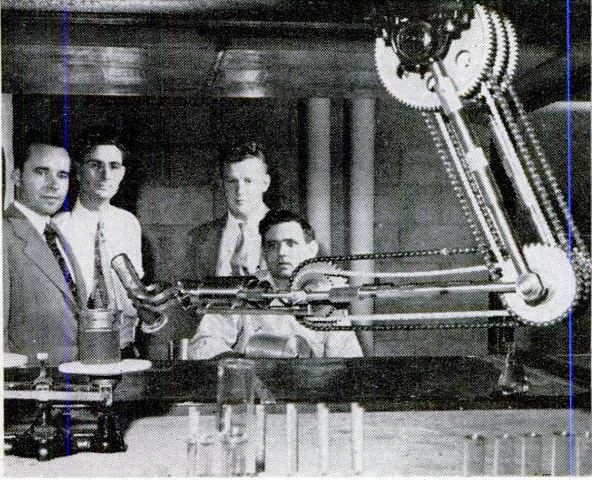
Inventor Art Youmans watches his "right arm" mix chemicals.
It is gentle enough to handle eggs.
Source: POPULAR MECHANICS, OCTOBER 1951

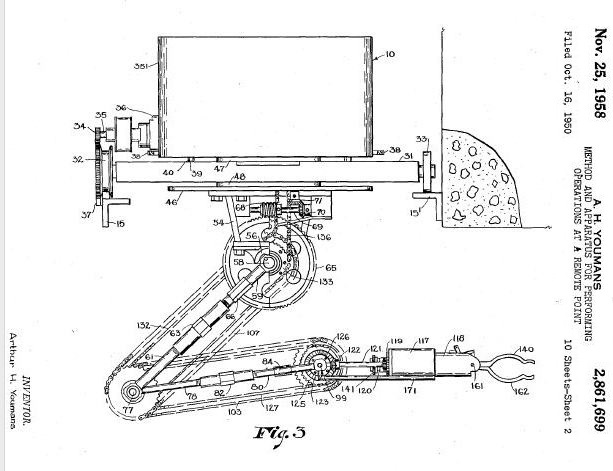
Publication number US2861699 A
Publication date 25 Nov 1958
Filing date 16 Oct 1950
Also published as DE976882C
Inventors Arthur H Youmans
Original Assignee Gen Mills Inc
Remote-control Manipulator
The present invention ……… provides a manipulator that may be entirely electrically operated from a remote point ……. The manipulator can be operated by a separate unit which transmits power to it in any desired manner. The device of the instant invention can be made to perform all of the operations that can be performed with the human arm as well as operations which would be incapable of performance with the human arm. It can be made to perform double jointed movements and large angle deflections of its elements which cannot be duplicated by the human arm. It is fundamentally different from a set of tongs because it can be directed to perform a complicated series of movements which the operator at the controls supervises but does not himself perform.
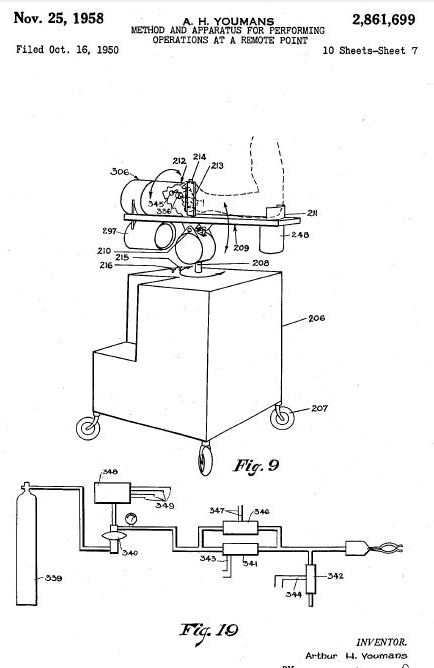
It can perform operations at any rate and in any manner which the operator chooses and each operation can be controlled with any degree of precision which the operator desires by independently reducing or increasing the speed of the separate elements moving in their respective degrees of freedom. Since each of the movable elements of the manipulator forming the subject matter of the present invention may be moved independently, delicate operations may be performed by incrementally moving one element at a time about its pivotal joint while all other movable elements of the apparatus remain automatically relatively fixed.
The apparatus of the instant invention is extremely versatile in that the hand of the manipulator is provided with gripping members which may be adjutsed to the position of the object being handled with respect to the axis of rotation of the hand. Thus, for example, in pouring one can hold the lip of the vessel stationary while rotating the body of the vessel or in holding a screw driver one can make the blade stay in a screw slot during rotation of the screw driver. This is made possible by adjusting the span of the hand by moving one set of digits which oppose a movable thumb in a manner that will align the object to be manipulated with the axis of rotation of the hand. Novel arrangements have been provided for actuating the grasping digits of the hand whereby any desired pressure can be exerted by the digits on the object being grasped at the will of the operator through the medium of the novel control provided for the manipulator.
… see more patent description here.
See other Early Teleoperators and Manipulators here.