The entry is significant in that it highlights the technologies of the time that enabled most of the early electric animals, mechanical men then later the robots to be operated remotely by sound, light, or radio waves. This technology and underlying principles influenced these machines for at least 50 years.
The technology is studied in detail in Miessner's book on "Radiodynamics", 1916 and is downloadable from here.
It all started with Ernest Wilson, and then the first practical example was Nicola Tesla's Teleautomaton.
from Radiodynamics p83-4
In the year 1897, when wireless telegraphy was still in its infancy, Ernest Wilson, an Englishman, was granted a British patent on a system for the wireless control of dirigible, selfpropelled vessels. The primary object of this invention was to provide a weapon for use in naval warfare, which, if in the form of a dirigible torpedo, controlled from a shore or ship wireless installation, would be most deadly in its effect on a hostile fleet. No mention has been found of actual apparatus constructed according to Wilson's plans.
To Nikola Tesla, probably more than to any other investigator, belongs the credit of first constructing a dirigible vessel which could be controlled from a distance without connecting wires. His experiments were begun in 1892 and from that time on he exhibited a number of wirelessly-directed contrivances in his laboratory at 35 South Fifth Avenue, New York City. In 1897 he constructed a complete automaton in the form of a boat (Figs. 40, 41 and 42), which would steer itself in obedience to guiding impulses of Hertzian waves sent out from shore.
On Nov. 8, 1898, he was granted a United States patent on this invention. In this patent he mentions the use of all forms of control energy including electromagnetic induction, electrostatic induction, conduction through earth, water, and the upper atmoshphere, and all forms of pure radiant energy.
There is book that describes the construction of some of these early technologies for remote control and that is "Ray Controlled Mechanism" by Major Raymond Phillips c1926.
Another book, which I don't have a copy of, is titled "High Voltage Fun" by CUTTING & SONS 102 Doe Street, Campbell, California c1932. It has an article that describes how to "Make a robot sing, dance, answer questions, amuse any audience."
Although Miessner gives considerable detail on the radio aspects, I will offer a very simple explanation of the collective technoly to early remote control of robots.
Most electrical mechanical men, automatons, and robots all go through a series of actions or commands. The number of actions increases with the sophistication of the technology and "one-upmanship" i.e. each new inventor had to have his contrivance outperform his predecessors or the current competition.
The commands are selected by an electro-mechanical device called a selector. The activation of a solenoid levers a ratchet and pawl mechanism. Selectors are rotary and there are electrical contact points wherever the selector action stops. The electrical contacts on the selector connnect up the circuit for the command "selected". These days we would call it sequential, or procedural programming. The order of the commands is all important, to support the choreographed routine of the robot . Deft operators of the time could trigger the selector to advance to the next command before that command had time to operate, effectively "skipping" over the unwanted command(s).
As we have seen already, the catch cries of the times were "Remote Control " , "Wireless Control " , "Sound Control", "Voice Control" and "Light Control", all under the auspices of "Ray Control".
Light Control :
It is all based upon the fact that the mineral selenium, which is not normally a conductor, becomes a conductor of electricity as soon as a ray of light falls upon it. As soon as light rays may be focussed upon the cell the selenium closes the circuit to the polarized relay and in turn closes the circuit to the selective device.
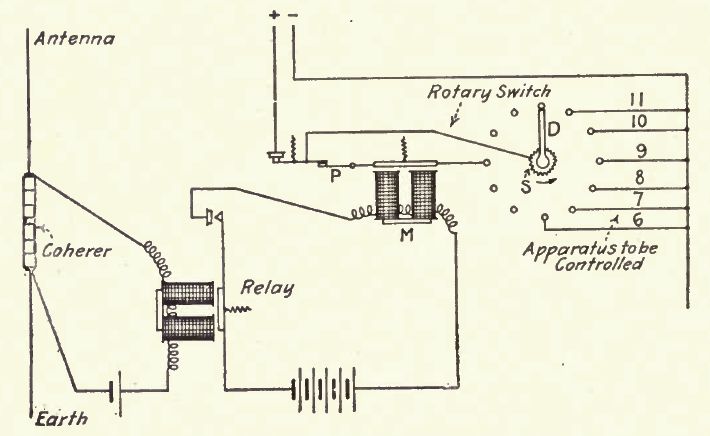
Radio Control (aka Hertzian waves) :
An aerial is hooked up to a device called a coherer which is in circuit with a polarized relay. Each time the key of a radio sending set (eg a Ouiden coil) is depressed, the coherer completes a circuit which will work in the same manner as when operated by flashes of light upon the selenium cell.
Sound Control :
This can be as simple as a length of wire that vibrates when sound waves come in contact with it. At a set point, the amplitude of the wire will be great enough to make contact with another pre-set point and complete the circuit.
I have various example to illustrate these with and will update this post over time. It may even become a category in its own right. I have articles on Selenium cell, light-control, voice-control (pre-Westinghouse Televox), and later ultra-sonics.