The VOR (Volitionally Operant Robot) is the robot of the future. Its sophisticated capabilities reflect state-of-the-art advances in robotics and artificial intelligence. Microelectronics technology has endowed the VOR with powers of sensory perception as well as locomotion and memory. It is able to comprehend and synthesize speech as well as view the world through camera "eyes." The VOR can also access computer data bases for information-in effect, communicating and learning from computers. (1983 publisher's blurb for the book "The Vor")

Most images from Carl Frederisk's site and the book. See Carl's pages on Omnivor here.
Technology News
Marrying voice recognition and synthesis, robot pontificates on Presidential race
Edward Teja, Associate Editor
August 11th will mark the beginning of both the Democratic National Convention and the career of a new political pundit – Omnivor, the world's first volitionally operant robot (VOR).
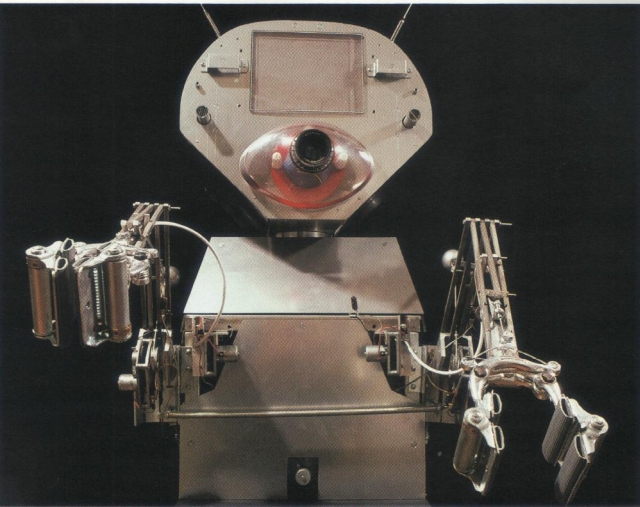
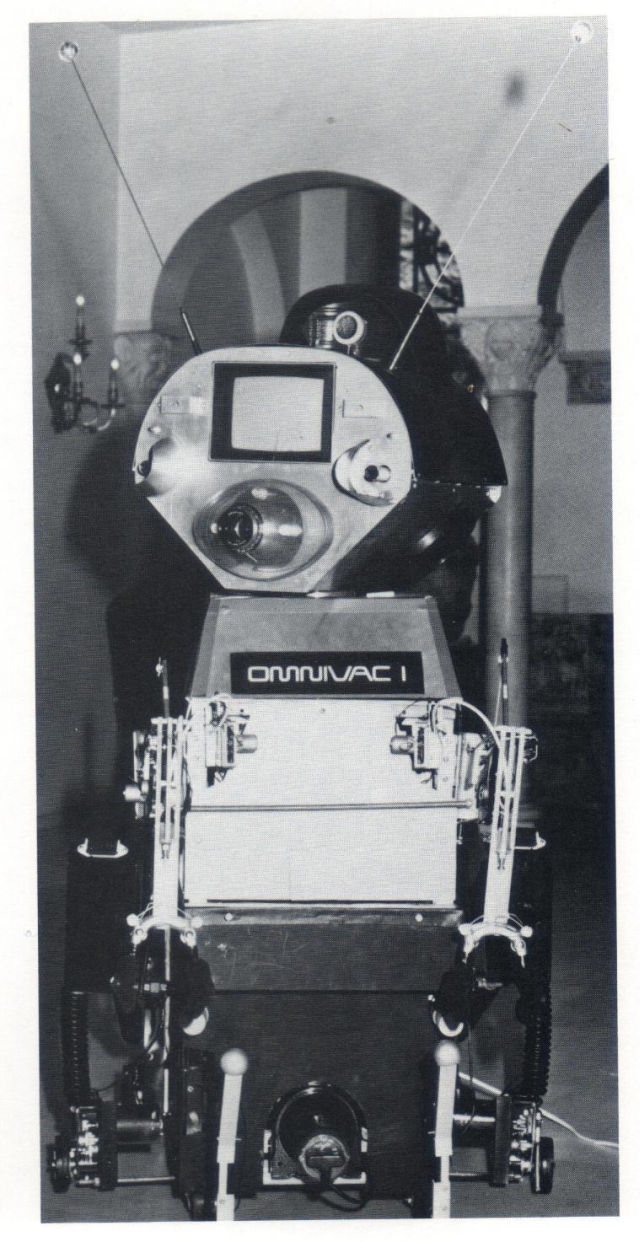
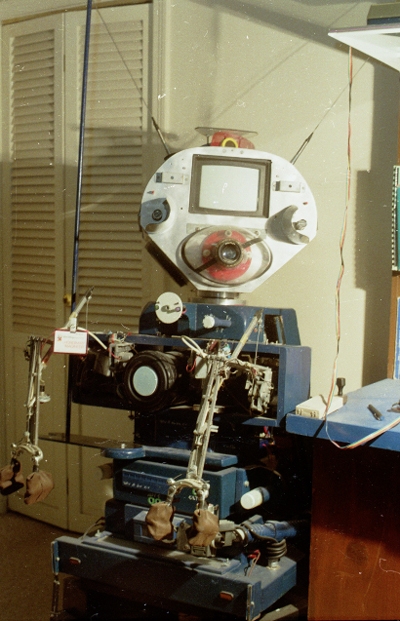
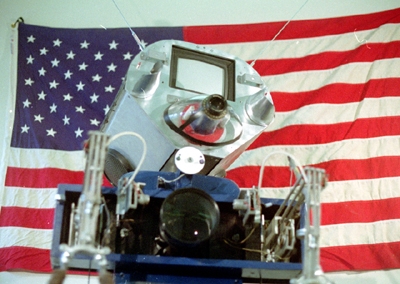
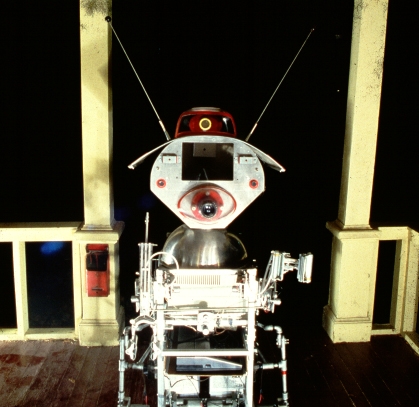
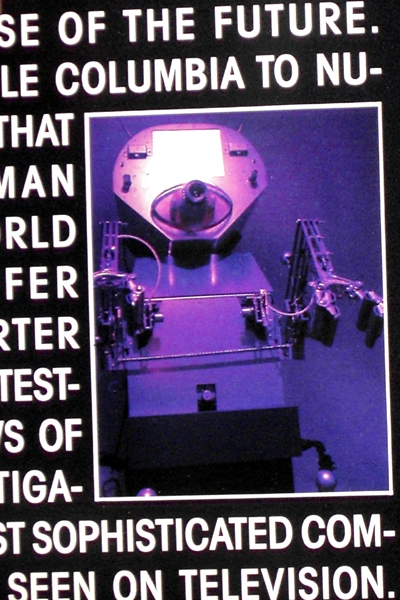
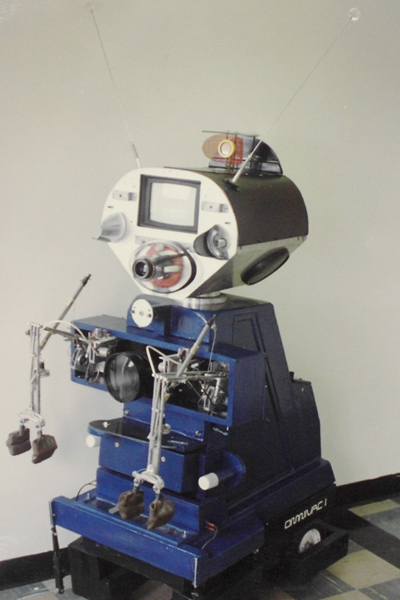
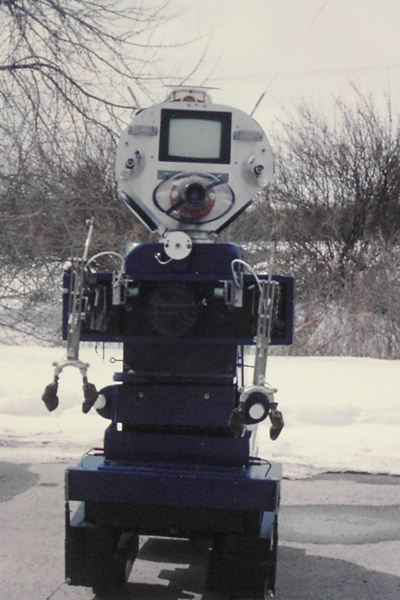
The product of Wolfdata, an Ithaca, NY systems house, Omnivor is a highly sophisticated system that blends voice-recognition, voice-synthesis and artificial-intelligence technologies into an interactive package. It's currently programmed to analyze political questions, searching the New York Times/Associated Press data bank and formulating meaningful answers to those questions based on the information it finds there. Omnivor isn't yet a stand-alone system, though. For now, an apparatus vaguely resembling a robotic head sits on a table, turning to face the person who speaks to it and answering that person's questions. The project definition, however, calls for Omnivor's hardware to eventually include everything needed for locomotion, manipulation, sensing, communication and decision making. Software support will handle such basic functions as nondirected activity, communications processing, artificial intelligence, fail-safe operations, sensing and task learning.
Wolfdata began the Omnivor project on speculation, and the gamble is now paying off. The self-contained robot's construction, costing approximately $100.000, now falls under a development contract with Omni magazine.
Scheduled for September 16th completion, the robot will undertake, among other task, many of Omni's promotional chores.
It will be equipped to handle such sophisticated jobs as giving slide presentations and lectures and answering telephones.
For whom Omnivor rolls
To accomplish all these tasks, Omnivor must be able to communicate efficiently. Communication, being a 2-way process, implies that the robot both speaks and understands—and it does.
The robot's hearing apparatus comprises two directional microphones connected in phase. As a speaker moves, the robot's head turns to face him. Most voice-recognition systems rely heavily on noise-cancelling microphones, typically worn close to the speaker's mouth, to keep signal-to-noise ratio at a tolerable level. Obviously, though, this solution doesn't suit Omnivor's mobile operation. Instead. the robot's input circuitry employs a power-filtering technique that, in essence, removes from the input all Fourier components whose power is less than a predetermined value. This process degrades the input signal's fidelity, but does not to the point that word recognition suffers. But eliminating noise problems provide word recognition; the analog (filtered) input signal must also be analysed and decoded. Omnivor employs a voice-recognition module (VRM) from Interstate Electronics Corp, Anaheim, CA, for these tasks; the module identifies 200 words. The combination of the VRM's inherent recognition capability with Omnivor' s resident intelligence has allowed Wolfdata's designers to use artificial-intelligence algorithms to interpret recognised words based on their context—their position relative to other recognised words. The algorithms also continuously update the VRM's recognition templates, providing dynamic training.
Recognizing words in their context in turns allows the robot to understand word associations and thereby "hear" in a manner that approximates the way humans hear and understand.
Speaking in tongues and tones
Omnivor's response to a question can assume two basic forms: verbal and musical. And the two aren't exclusive; the robot could recite poetry to an accompaniment of background music.
For now, Omnivor's voice output comes from the same voice synthesizer that Texas Instruments, Midland, 0dessa. TX, has developed for use in its home computer. The synthesizer's speech quality is high; its only real limitation centers on the size of the vocabulary available in ROM.
To offset this limitation, Omnivor will eventually incorporate a phoneme synthesizer from Votrax, Troy, MI, to supplement the current voice-synthesis system. An algorithm will cause the TI unit to output whatever words are in its vocabulary; the Votrax unit will then supply any additional words needed to complete a thought.
The music synthesizer helps Omnivor keep pace with human expectations biased by an overdose of "Star Wars" rather than by any specific need for sound effects. Such a sensational product is forced to live up to the unrealistic billing given robots by writers who aren't engineers. Luckily, though, Wolfdata project leader Carl Frederick considers adding such fine touches among the project's more rewarding design tasks.
Power to spare?
The mobile robot utilizes inexpensive NiCd batteries rather than silver-cell units. When the battery charge begins to rundown, Omnivor sends out a radio signal that activates a transponder an operator plugs into a wall socket The robot then homes in on the transponders signal and plugs in its battery charger.
An alternative method employs a special transponder that surrounds each wall socket the robot could detect this transponder visually and home in on the socket.
Programming spontaneity
Robots, being programmed devices, don't act randomly. So to appear to act spontaneously, Omnivor must take its behavior cues from environmental changes that are independent of its programming and thereby seem random. For example, using on-board sensors that measure atmospheric pressure, temperature, and humidity, the robot can react to subtle weather changes. This capability enables Omnivor to deliver weather reports.
Taking a look around
The remainder of the robot's sensing capabilities includes tactile switches that indicate curbs and obstacles (see box, "How Omnivor comes when you call"), infrared detectors, ambient-light monitors, magnetic-field detectors, radiation-level and air-pollution-level sensors and liquid sensors. How it uses these sensing devices depends entirely on the programmed task. And if that isn't enough, Omnivor will also be able to see. Its vision won’t be binocular, though. Rather, two camera eyes will provide low-resolution mosaic video with a bandwidth low enough to allow the robots on-board µC to process. By connecting Omnivor to a large computer via its RS-232 link, a user can temporarily take advantage of even greater computing power. When answering questions about politics, for example, the robot ties into the New York Times/Associated Press information bank to provide up-to-date replies. It remains mobile by combining a radio link with a telephone patch.
But does it do windows?
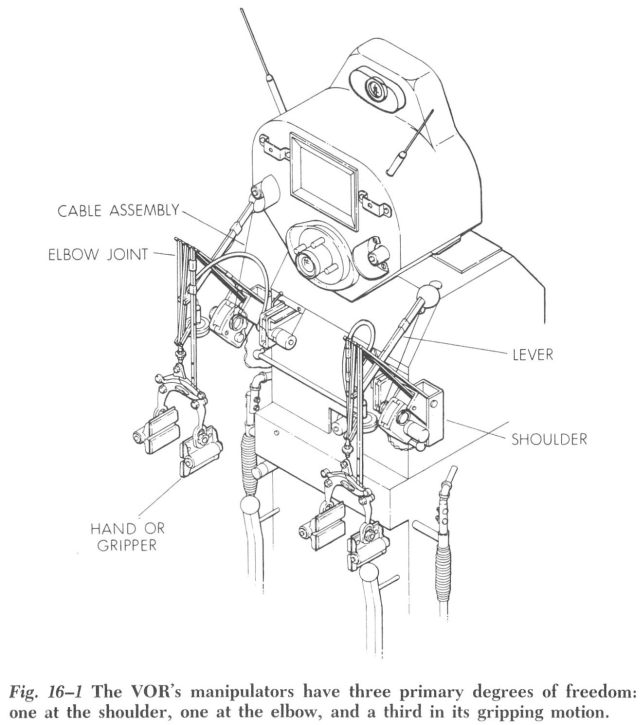
In addition to sensing its environment and interacting with it via speech Omnivor, will also eventually manipulate that environment. The technically mature devices that allow such manipulations are called, logically, robot manipulators or Waldoes (after the hero of a novelette by Robert Heinlein). They don't duplicate human arm motion but rather use a specialized set of arm movements (such as arm lengthening) suited to mechanical tasks.
Such manipulators shouldn't appear too nonhuman, however; the existence of two nonprosthetic looking arms is important—bilateral symmetry seems to be critical to gaining human approval and acceptance of robots. Omnivor's hand mechanism thus takes its structure from those of its organic inventors. But it will feature three fingers and two opposed thumbs. (Who can resist trying to improve on a design, after all?)
The on-board processing Power that supports all of Omnivor's activities comes from a µC with 64k bytes of RAM (expandable to 512k). Programming occurs in both a high-level language, (such as BASIC or PASCAL) and assembly language.
The system requires large expansion capability to accommodate the music and voice synthesizers and as many as 255 output channels. A floppy-disc drive, 9-in. CRT, ASCII keyboard and communication-protocol board handle programming and communications requirements. Finally, analog-I/O channels accept the sensor inputs for processing.
Creative design
Omnivor's mind is thus a reasonably conventional µC system, little of its construction (other than the programming) is unique. What makes the robot a standout is the thought behind the design—its designers' creative use of available technology.
Certainly the combination of voice I/0 and artificial intelligence that has produced Omnivor represents a change in the way humans regard machinery. Omnivor is thus a critical step in robotics. At first it will be halting and stupid, but it does have task-learning capability. And as an attempt to put voice I/O in a novel application, Omnivor succeeds totally.
How Omnivor comes when you call
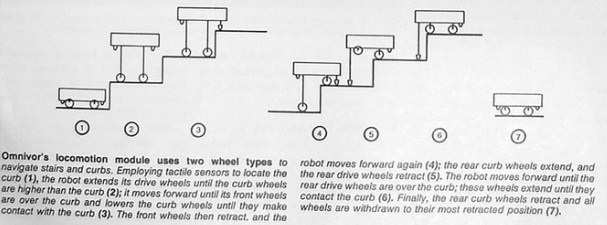
Omnivor's basic supporting module also provides its locomotion. To be generally useful, this module must give the robot the ability to move in any direction and negotiate curbs and stairs, as well as navigate on level ground.
The module employs drive wheels and curb wheels; both types are extendable, allowing the robot to rise about 10 in. off the ground. The curb wheels don't take part in standard locomotion and only come into play in negotiating curbs and stairs (figure below).
Position sensors and an on-board program completely handle climbing operations; the program even takes into account situations when the curb is higher than an 10 in., excelling Omnivor's ability to ascend.