





 of Arok_Herald-Sun78p2-x640.jpg)
 of Arok_Herald-Sunp1-x640.jpg)
 of Arok_Herald-Sun78p2-x640.jpg)
Miss Nude World with AROK – click here only if over the age of 18.
{kind=link}
VIDEO CLIPS
See 1979 French newsreel clip here showing Arok, SNEB, and Ben Skora's automated house.
"Home Movie" DVD extract (6 minutes into 9 minute clip)
See also this clip made by Ben's friend and modern filmmaker, Bohus Blahut
(BOH-hoosh BLAH-hoot).
Interface Age Apr 1977 pp38-9
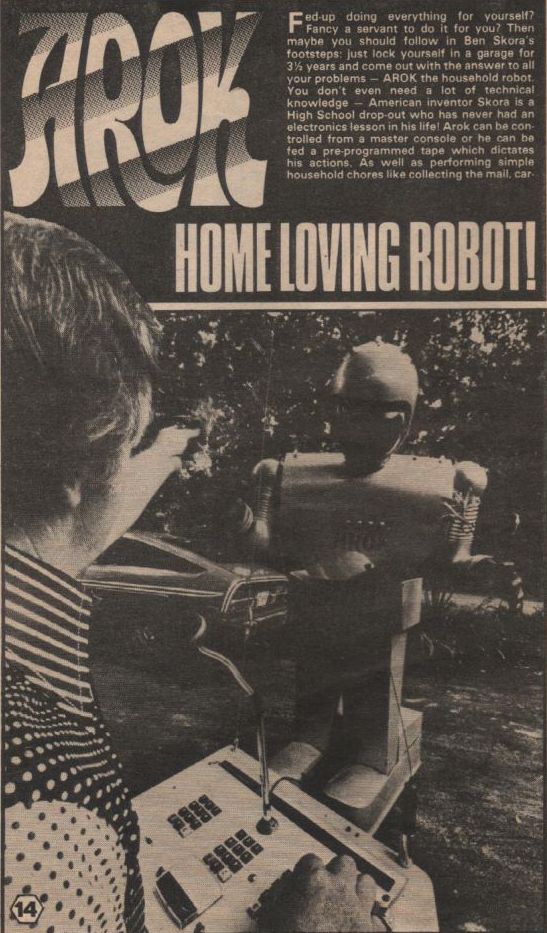
AROK
By Linda Folkard-Stengel
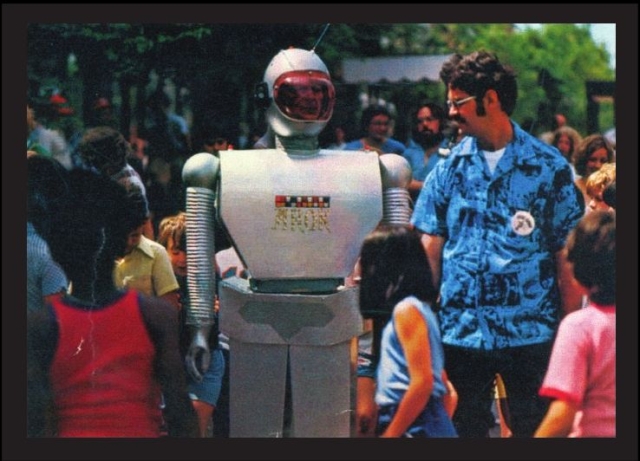
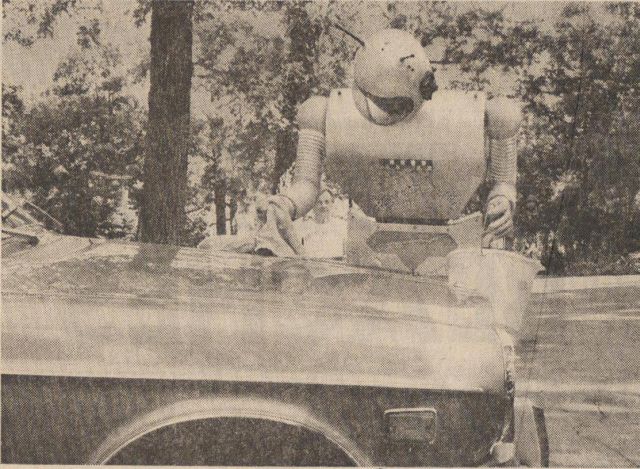
Inventor Benjamin Skora is a resident of the Chicago area, a region notoroius for its fearsome winter climates. Back in 1949, Mr. Skora designed a system into his car that would enable him to start the motor of his car and warm up the passenger cabin before the driver had left the warmth of his home. He operated this convenient device for many months. Its success inspired him to add to the unit until he had designed a system by which the driver could sit on the porch and direct the car to start, stop, open and close the windows, honk the horn and wipe the windshields.
With each new car Mr. Skora acquired, he built in his telemetered system with improvements. The remote- controlled car became a local attraction and soon the inventor was displaying his system for promotional purposes.
What could so successfully be done with a motorcar, might also be done for an indoor machine. When the Skora family built a home in Palos Hills, Illinois, Ben Skora incorporated many futuristic features into the dwelling; sliding doors operate electrically, draperies open and close by push-button and a revolving turntable contains a seating arrangement which swings around to open to the patio in good weather. Kitchens and bathrooms are automated for maximum convenience. All that was needed was a robot to push the buttons—and Ben Skora designed one.
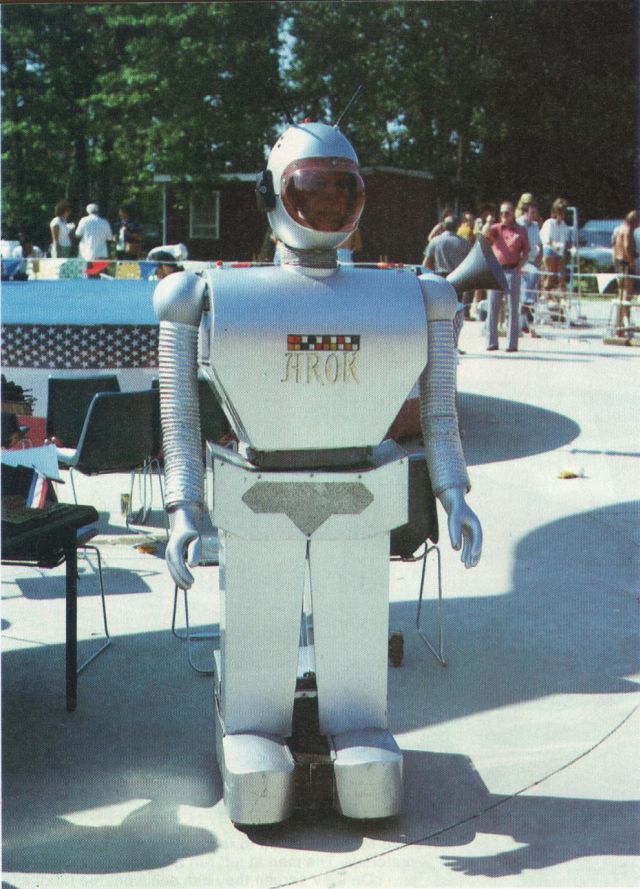
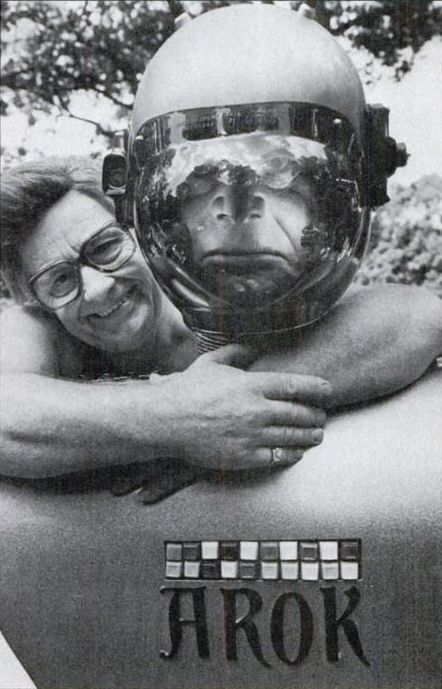
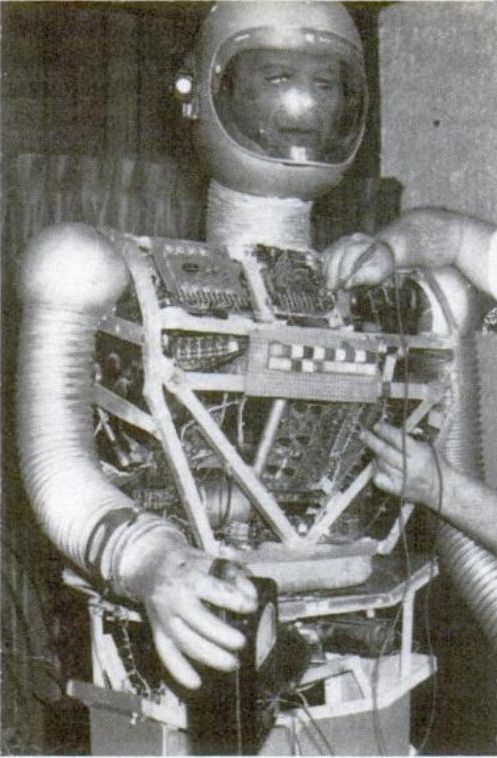
AROK
The name AROK is derived from "Skora" eliminating the "S" and backwards. According to its creator, it is more than a mirror-reversed version of the designer; it is a crystallization of the upwelling vapours from the wellsprings of creativity resting quiescent within the human consciousness. Ben Skora has no training in electronics; a former owner of a recording studio, he is completely self-taught.
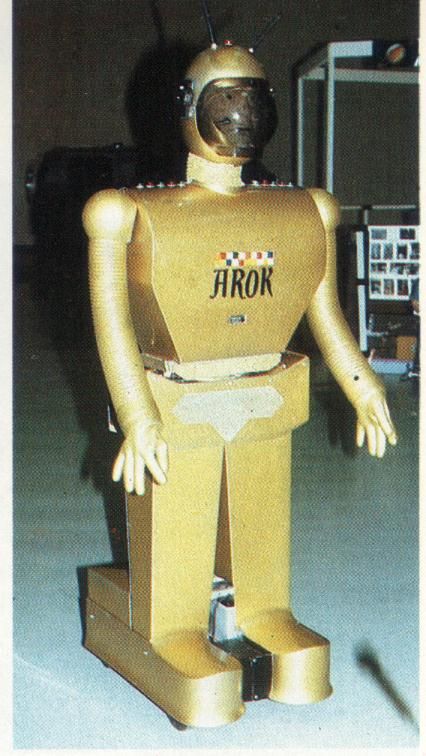
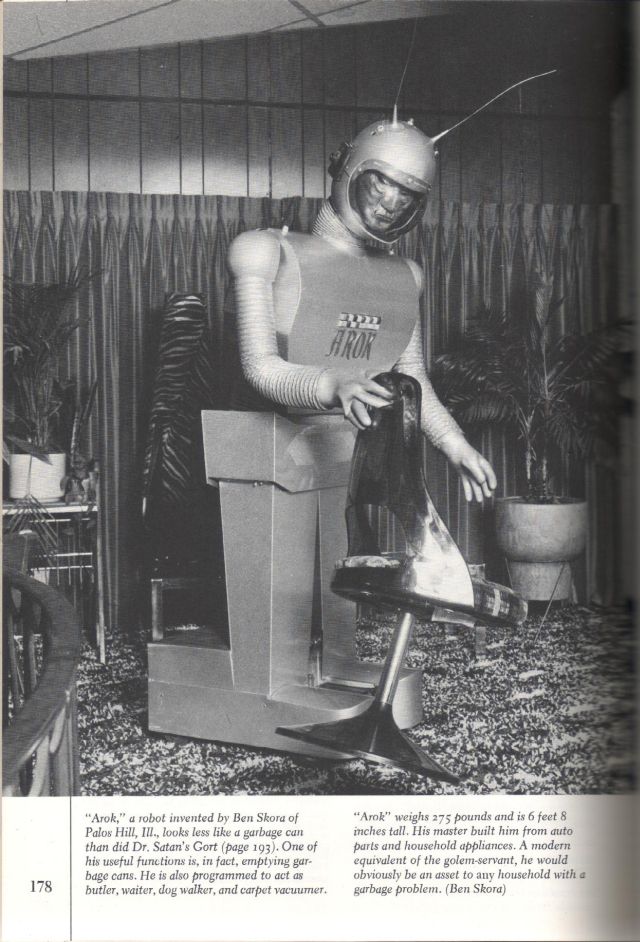
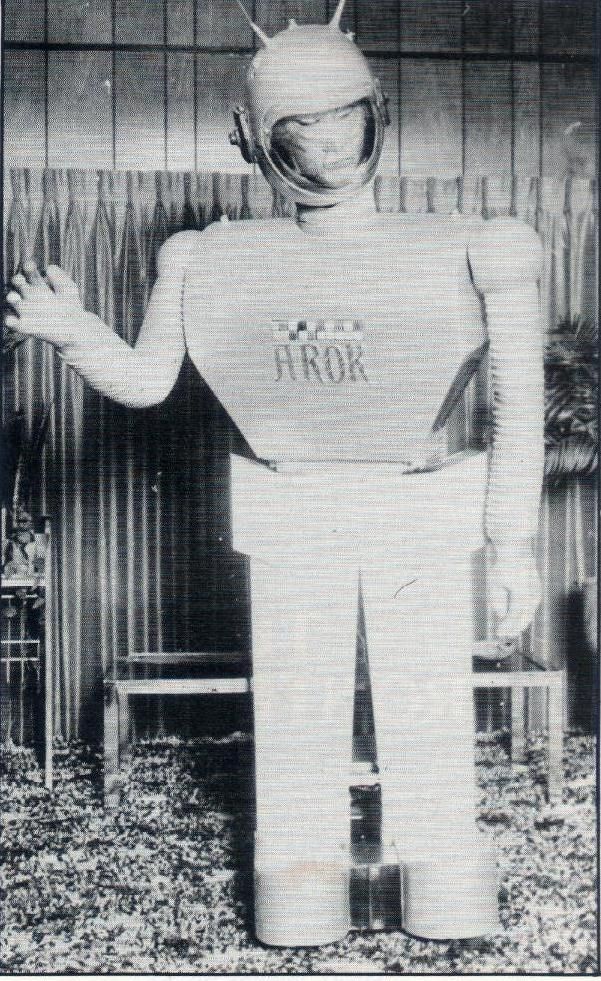
AROK has an insurable value of over a million dollars. It is 6'8" tall and weighs 275 lbs. It has the capacity of lifting 150 lbs. Power is derived from two 12V car batteries, one to supply power to the electronics and the other to the drive motors.
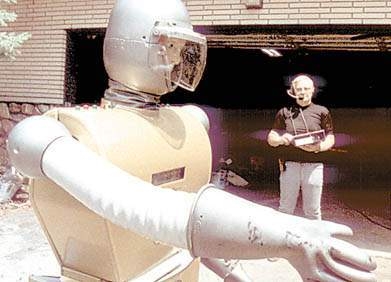
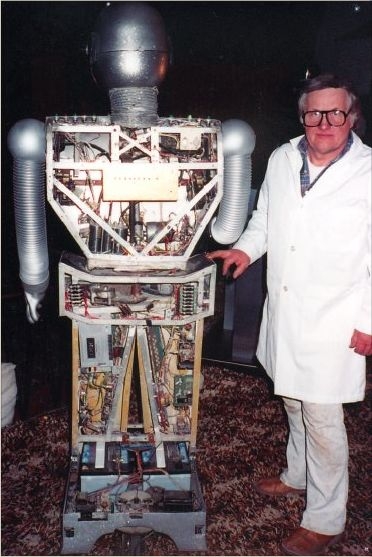
FRAMEWORK
The frame at the base is made of heavy angle iron. The entire upper frame is aluminum. The batteries are placed on platforms in the feet and the drive mechanism in the base. This gives the unit a low center of gravity. enabling it to bend over and lift weights without tipping over. He can bend at the waist to a 45% angle and turn the upper torso to the right and left.
The integument of the body is aluminum sheeting, hand formed and welded.
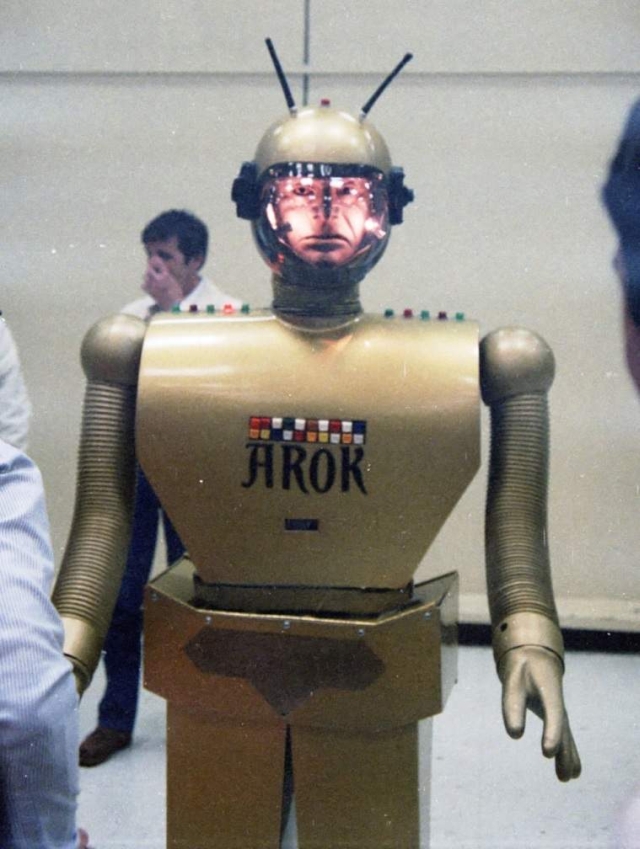
The "skull" is molded from fibreglas and the face shield is from a motorcycle helmet. The face inside the helmet is a rubber mask which covers the actuating mechanism for the jaws.
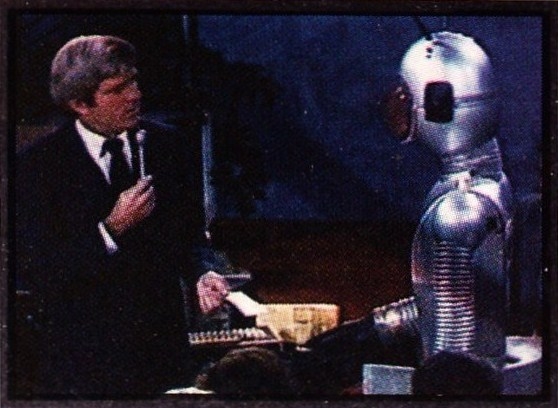
The flexible neck enables the head to move forward, backward, right and left. This movement greatly enhances the lifelike appearance, especially during conversation. The electromechanical jaw actuators contain attachments to the inside of the mask at the mouth. A microphone and a speaker are contained in the head. As the operator talks into the microphone in the control panel, the robot jaw mechanism responds to the voice causing the lips to move.
The arms are jointed at shoulder, elbow and wrist. The arms can raise from the shoulders, the elbows can bend.
The rubber-glove-clad hands are designed on bushings and screwjacks which allow for grasp, roll and rock motion creating an uncanny illusion of humanlike motion.
AMBULATION
AROK moves at a variable speed from two to three mph, forward and backward on wheels with a turning radius equivalent to his own length. The wheels are set into the bootshaped housing for the batteries. Control of ambulation is achieved by telemetry and built-in program.
TELEMETRY
Three antennae in the head receive and transmit signals from the control panel through F.M. wavelengths. The tones are generated by conventional telephone pads The control panel has a bank of buttons, each representing a field of function and corresponding to a motion function on either side of the robot. To raise the right arm, Button #1 is depressed; to lower the right arm, #2 Button is actuated; Button #3 raises the elbow up and #4 lowers it. The control pannel supplies the robot with 36 functions at present and an additional 36 functions are planned to be added in the near future.
Signals transmitted to the robot are filtered through a set of active filters then to relays for two-speed modulation of the motors in the various areas of the body. There are a total of 15 motors, all of them redesigned automobile electric motors connected to approximately 35 relays and hundreds of solid-state ICs and transistors.
AUTO-OPERATION
A memory tape enables the recording and programming of the telemetered routine to be repeated at will. Ben Skora at present is working on autonomous movement by means of the microprocessor. His programming routines will be the subject of future articles.
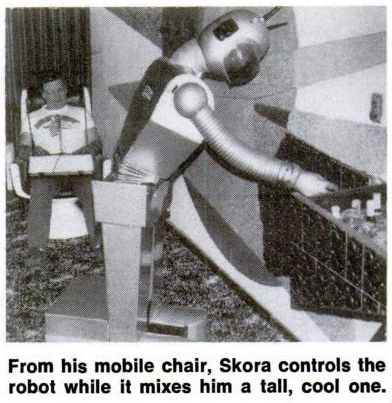
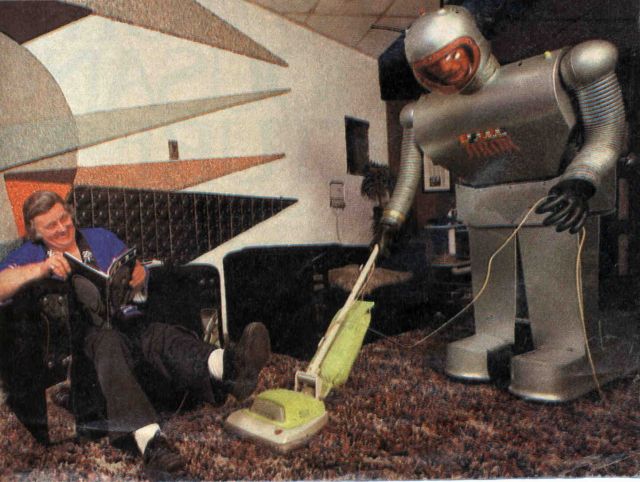
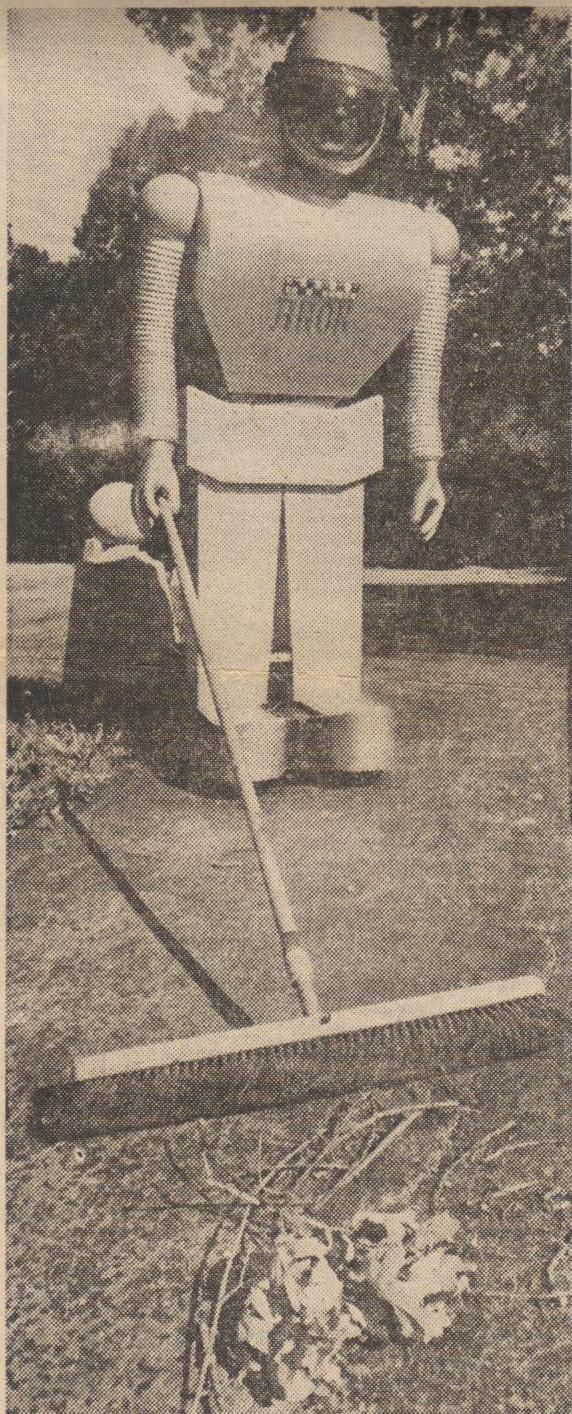
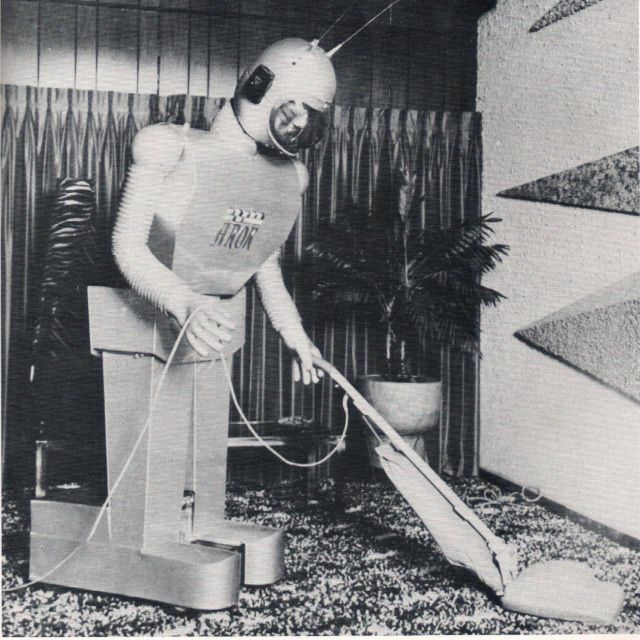
PRACTICAL APPLICATIONS
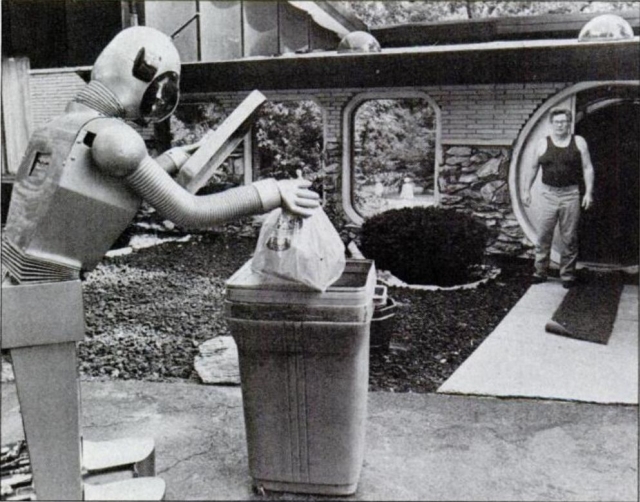
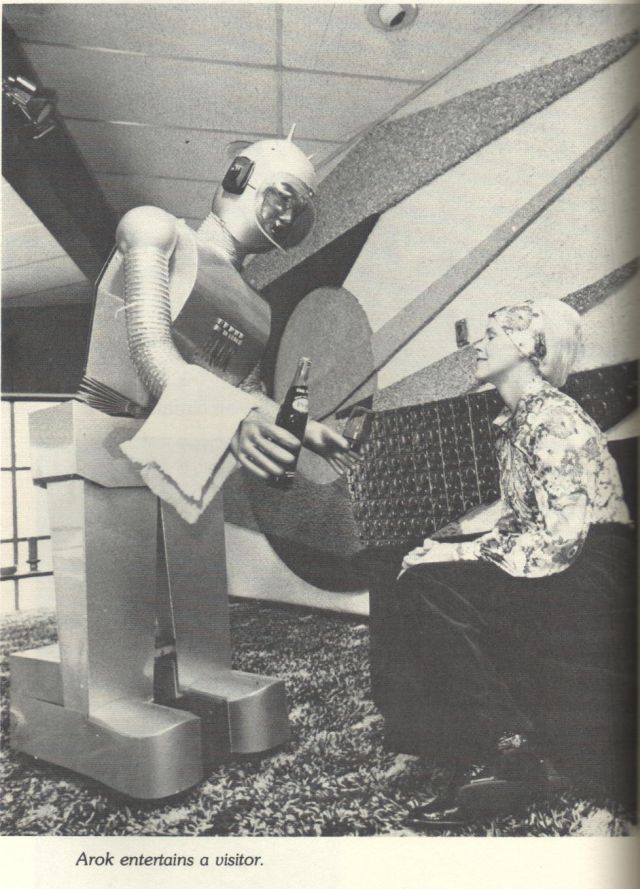
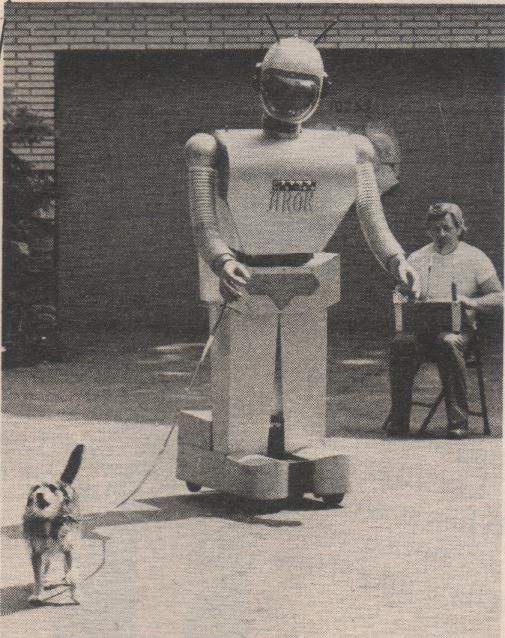
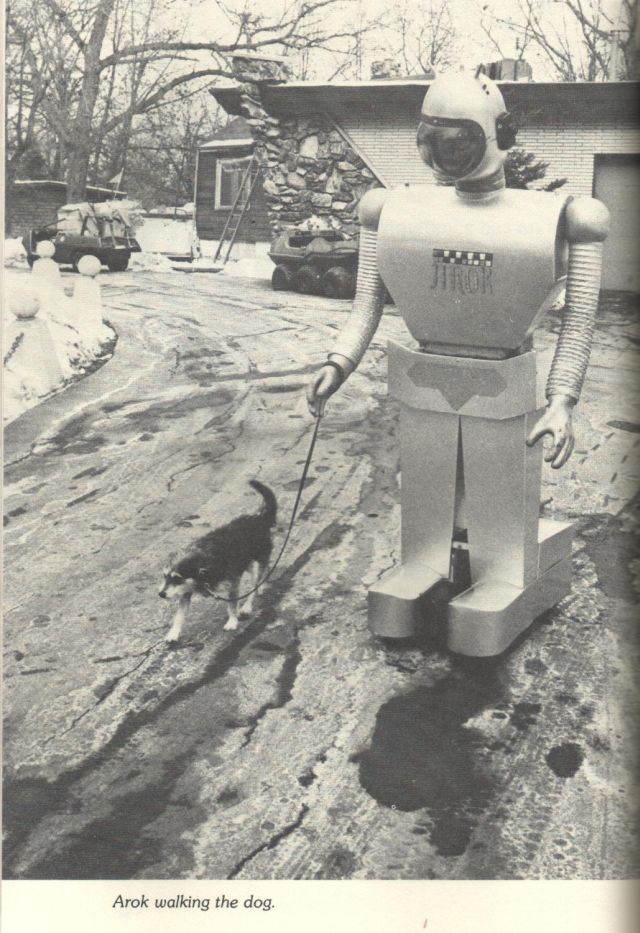
The Skora robot at this time vacuums the carpet, walks the dog, picks up and carries parcels, serves drinks and answers the door. Its principle function at this time, however, is a demonstration device and a public relations spokesman for the coming age of cybernetics. Children find the adult-sized toy irresistible and knowledgeable adults listen attentively as Ben Skora describes his future plans for a bio-feedback organism operated by alpha waves.
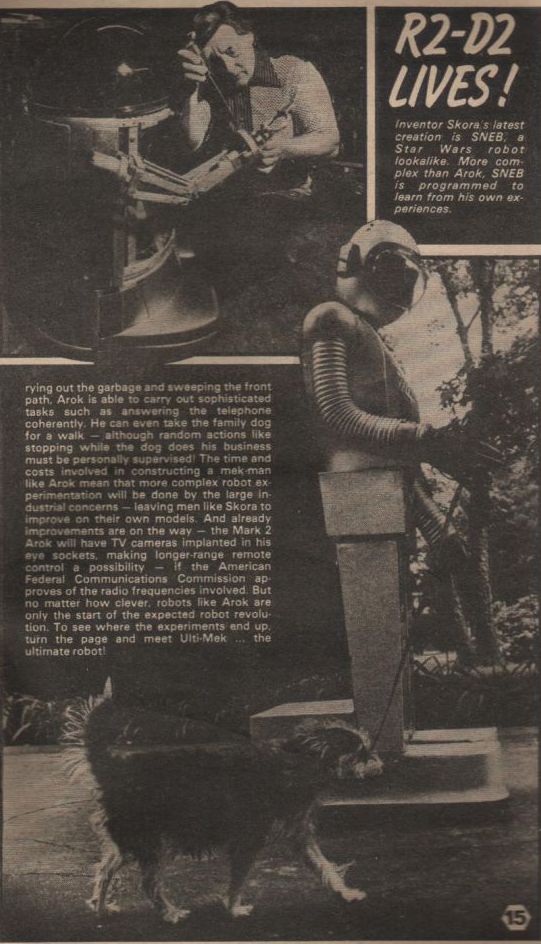
SNEB
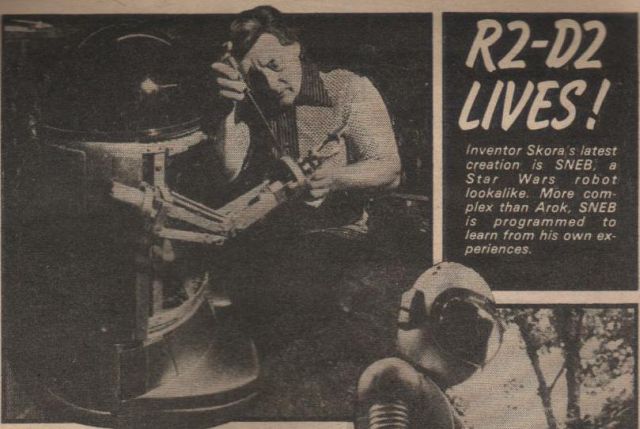
Inventor Skora's latest creation is SNEB, a Star Wars robot lookalike. More complex than Arok, SNEB is programmed to learn from its own experiences.


I love the photo archive. And it’s kind of interesting that Skora mentions biofeedback for remote operation. My main interest lies in biofeedback machines and therapy. I’m not sure what you control with ‘alpha waves’, though. I suppose one day we’ll look back at Honda’s Asimo with the same kind of nostalgia…