
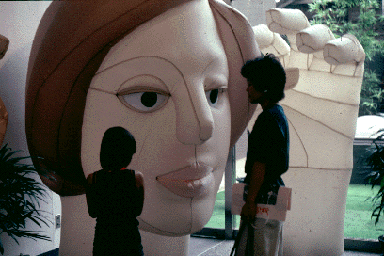
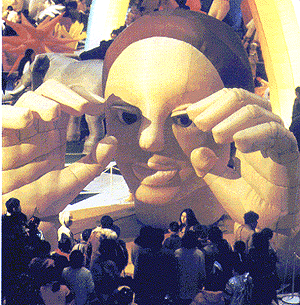
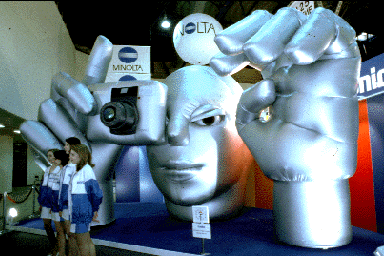
The inflatable hand first appears at The First Annual International Computer Art Exhibition – Cybernetic ARTRIP, Oct. 6-21th. 1973 at the Ginza SONY Salon.
See Shiro Takahashi's website here.
When trying to squash a balloon having a particular shape, it is necessary to apply unexpectedly large force, and even if forcibly trying to squash the balloon, its shape does not become stable.
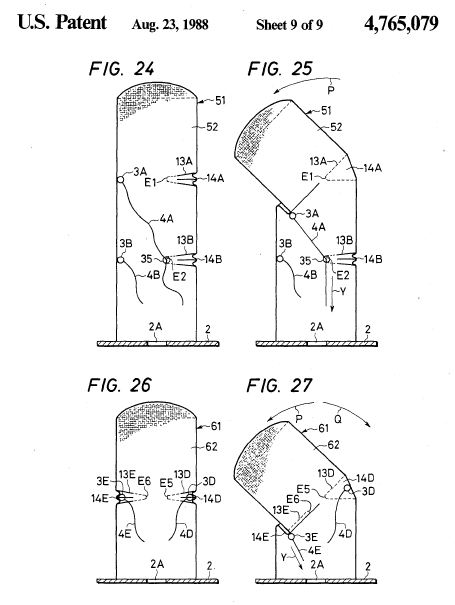
According to an invention of pneumatic membrane mechanism by Shiro Takahashi (US Patent No.4765079) , when blowing up a piece of membrane formed into a closed shape to form a balloon, the surface of the membrane of the balloon is made to have an expansible margin where the fulcrum of the motion of expansion is created.
According to the pneumatic membrane mechanism, the pneumatic membrane can be safely expanded into a huge structure by desired force.
The internal pressure fluctuation of the structure can be controlled into a small rate during the expansion, large motion for expanding the structure can be quickly and smoothly achieved by small force, and therefore, the large motion can quickly respond to a control signal from the computer, and can play a powerful presence.
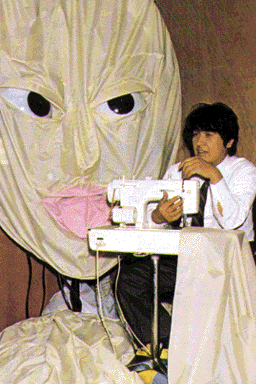
The pneumatic membrane mechanism has a simple structure formed using air and cloth only.
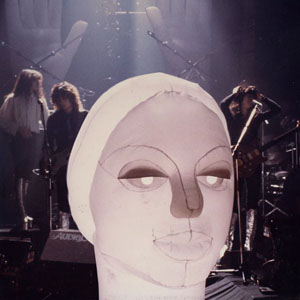
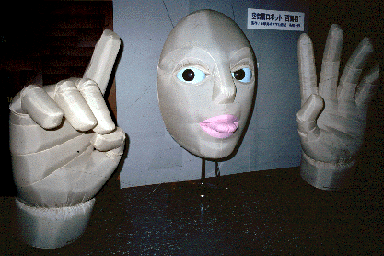
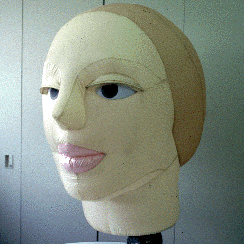
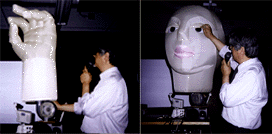
The eyes, mouth and tongue are computer controlled.
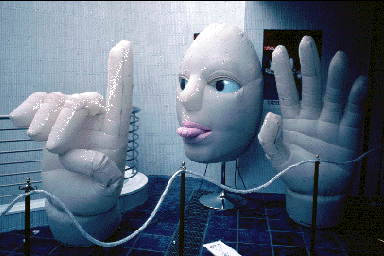
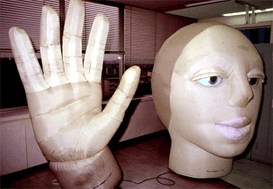


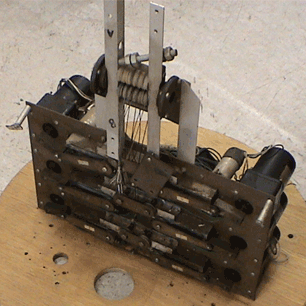
Above: The computerised tendon mechanism.
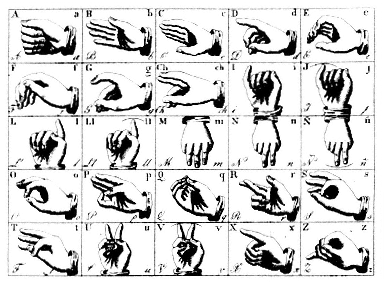
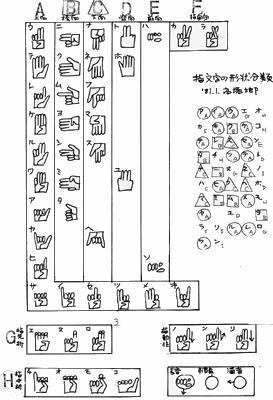

Talk in dactylology System.
Pneumatic structure by Shiro Takahashi
See full patent here.
Patent number: 4765079
Filing date: Dec 1, 1987
Issue date: Aug 23, 1988