
A world’s-first robot that he built had inflatable arm linkages for deployment in hostile and confined spaces. The inflatable robot is a low-volume and low-weight alternative to rigid arms. The inflatable robot arms can achieve the required load-bearing capacity and rigidity through the appropriate selection of size and pressure. The links of the robot are made of thin film material and are inflatable by air or other gas. The robot can achieve the required load-bearing capacity and rigidity through the appropriate selection of materials, size and pressure. This robot might be useful for surveillance and resource operations, or in areas difficult to access in buildings.
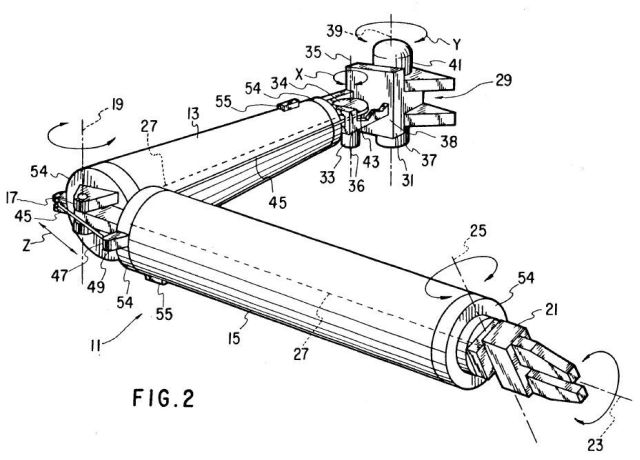
An inflatable structure, particularly adapted for use in outer space, employs one or more inflatable links which are connected at a base of the structure. A distal end of an outer most link is provided with a gripper assembly which can be remote controlled, and suitable encoders are included to indicate the angular position of each of the links. The motors for driving the at least one link is situated at the base to thereby reduce the mass of the at least one link and correspondingly reduce moments of inertia during operation.
Inflatable structure Yoram Koren and Yechiel Weinstein
Patent number: 5065640
Filing date: Jul 9, 1990
Issue date: Nov 19, 1991
See here for full patent details.
Although Yoran is Israeli, he invented this arm whilst working at the University of Michigan.
See other Pneumatic, Fluidic, and Inflatable robots here.