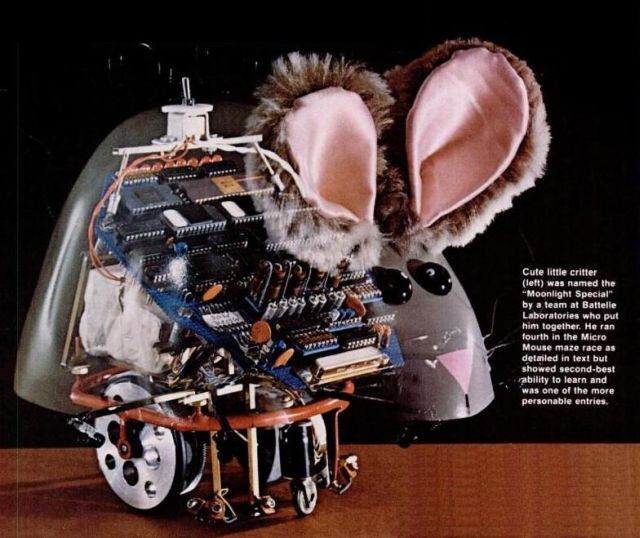
"Moonlight Special"
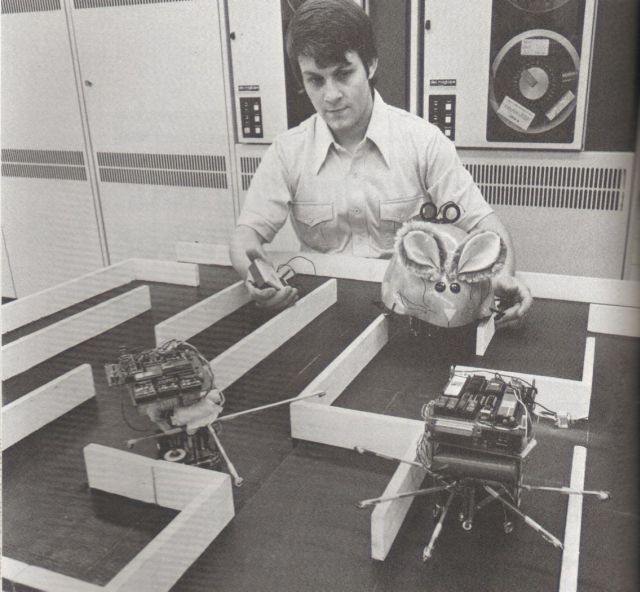
Photo at Battelle Pacific Northwest Laboratories
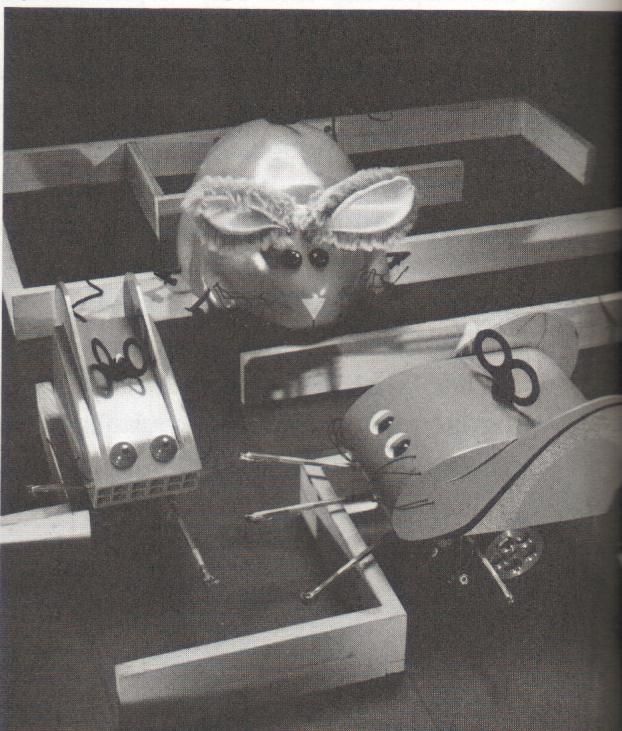
Top – "Moonlight Special" , Middle- "Moonlight Flash" , Bottom Right – "Midnight Express" all in full dress.


In 1977, Machine Design sponsored yet another mouse contest, "The great Clock Climbing Contest", coupled with the rediscovered information of the 1972 "Le Mouse 5000" contest that spurred on the editors of the IEEE Spectrum magazine in their search for a truly electronic mouse. After much brain-racking and consultations with major manufacturers of microprocessors, they finally came up with the concept of a micromouse – a small microprocessor-controlled vehicle imbued with intelligence and capability to decipher and navigate a complicated maze. In May 1977, the first US contest, called the "Amazing Micromouse Maze Contest" was announced by Spectrum.
New York, June 5-7, 1979. A highlight at the National Computer Conference has 15 micromouse gathered, all poised for a go at the grand prize, of US$1000, and other prizes including an oscilloscope donated by Tektronix and a video computer system donated by Atari. It was the finals of the "Amazing Micromouse MazeContest", a fitting culmination since its first announcement in the May 1977 IEEE Spectrum magazine and four preliminary time trials later.
The final 15 pesky mice were part of the 6000 entries received, some from as far as Italy. Apparently, many failed to turn up – some reported "brain failure" while others claimed mouse "blow-up" and a variety of other reasons. While interest was high, evidently, the design and construction of an intelligent mouse was to be much tougher than most cared to think. Many contestants reported having spent 500 to 1000 hours, many of them off-work and up US$500 on materials and components. Obviously money was not the main reason for entering the contest.
Of the 15 mice, only 4 managed to solve the 8×8-foot maze during their first run and 2 more at their third attempts. The eventual winner was "Moonlight Flash", a mechanical non- intelligent mouse employing a wall- hugging strategy, romping home in a time of 30.04seconds. That a "dumb" mouse could outwit its electronically more sophisticated and supposedly more intelligent opponents then led to the rules being amended for subsequent contests. Instead of being along the perimeter, the goal was placed at the centre of the maze.
1. Allan, Roger "Three Amazinq Micromice: hitherto undisclosed details. A closer look at some of the 'smart' electonic micromice that have participated in the Spectrum/Computer Amazing Micro-Mouse Maze Contest.", IEEE Spectrum Vol. 15:11 November 1978
2. Allan, Roger "The Amazing Micromice: See how they Won. Probing the innards of the smartest and fastest entries in the Amazing Micro-Mouse Contest.", IEEE Spectrum Vol.16:9 September 1979 pp62-65.
(extract from ref. 2 above)
At the finals in New York's Sheraton Centre, three engineers – two from Battelle Northwest and one from WED Enterprises – teamed up to score a sweep as two of their entries took prizes for fastest and smartest mouse, respectively. Four other micromice solved Spectrum's maze, and two won prizes. Of the 15 micromice entered, only six managed to solve the maze at least once.
…….
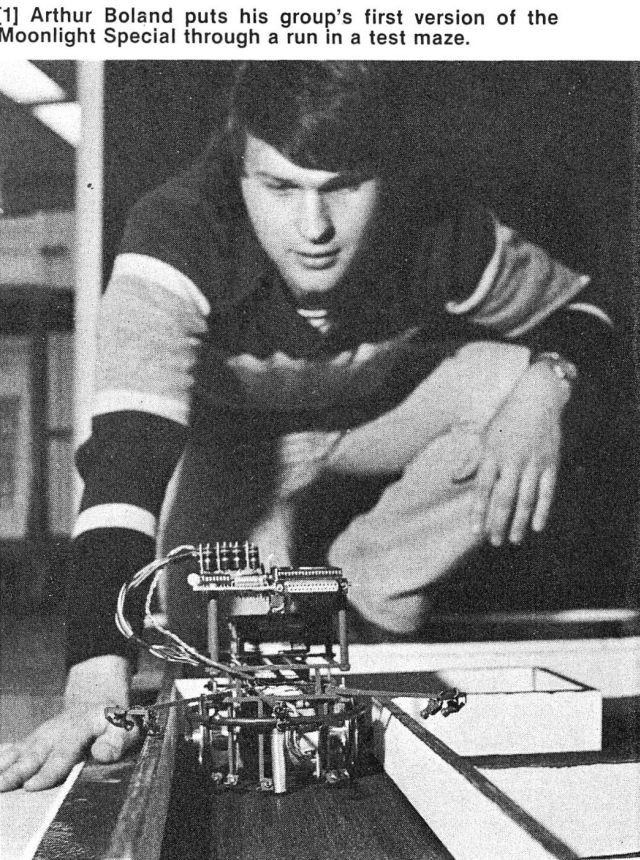
Learning by exploring was, in essence, the algorithm used by Moonlight Express (Fig. 1)
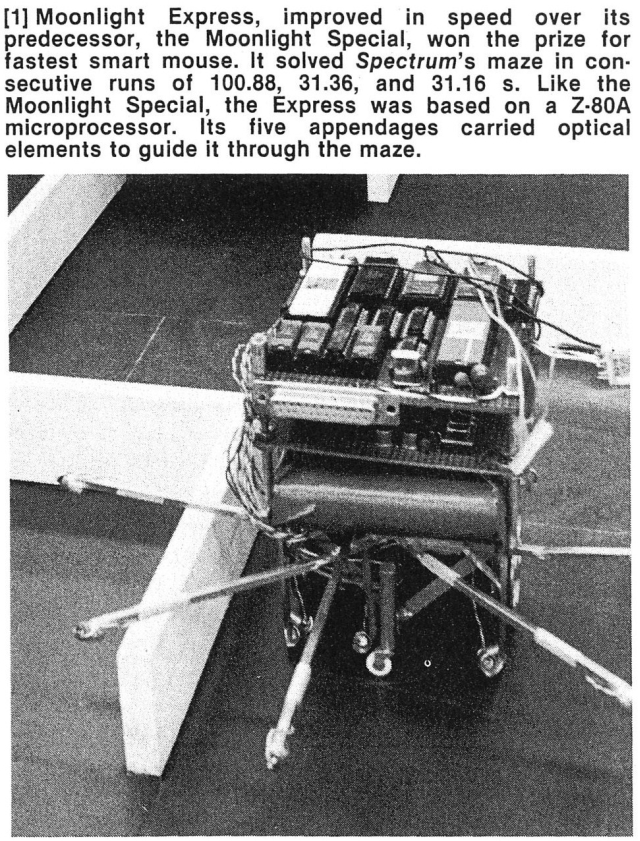
as it negotiated the maze in record learning time. Designed and built by Art Boland and Ron Dilbeck of Battelle Northwest Laboratories, Richland, Wash., and Phil Stover of WED Enterprises, Glendale, Calif., it was an improved version of the Moonlight Special, a smart micromouse that had demonstrated its learning prowess at previous time trials of the contest as well as at the finals.
The major difference between the Express and the Special was in their foward speeds: the Express had stepping motors with four times the torque used on the Special. Top motor speeds of 52.07 cm/s for the Express vs 20.32 cm/s for the Special were made possible. In addition the motor-drive circuitry for the Express was strengthened to handle the increased load of the new motors, and the Special's gear train was entirely eliminated.
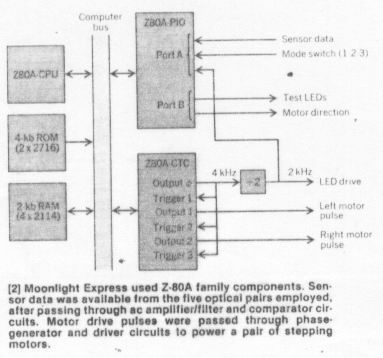
Some of the hardware used in the Special – for example, interrupt logic – was eliminated by the use of IC devices that were exclusively from the Z-80A family of components (the Express was based on the Z-80A microprocessor, as was the Special). This represented only a slight modification of the earlier electronic circuitry in the Special (Fig. 2).
A distinguishing feature of the Special was that it looked like a real mouse. Everything else – the optical sensor arrangement, battery supply, and the high-level software – were the same in the Express as in the Special.
The Moonlight Express and Special were equally intelligent. Both went through the maze on their first runs, exploring paths and mapping nodes (or three-way crossings) into their memories. Both solved the maze on each of their second and third tries, traveling the shortest possible maze routes, from entrance to exit.
The battle of the wall huggers
It was at the third time trial in Los Angeles last year that the Battelle team of Art Boland. Ron Dilbeck, and Phil Stover (Mr Stover is now with WED Enterprises), decided to build a wall hugger They had designed the Moonlight Special, the smartest micromouse observed, but at the time trial the team of Gary Gordon, Gary Sasaki, and Ken MacLeod of Hewlett-Packard, Santa Clara. Calif., Introduced Harvey Wallbanger (below). This right-wall-hugging mouse, with no electronic intelligence, made up with speed what it lacked in brains. It traversed the Spectrum maze in the third time trial In 41 s on its first run.
Thus was born the Moonlight Flash, (right)
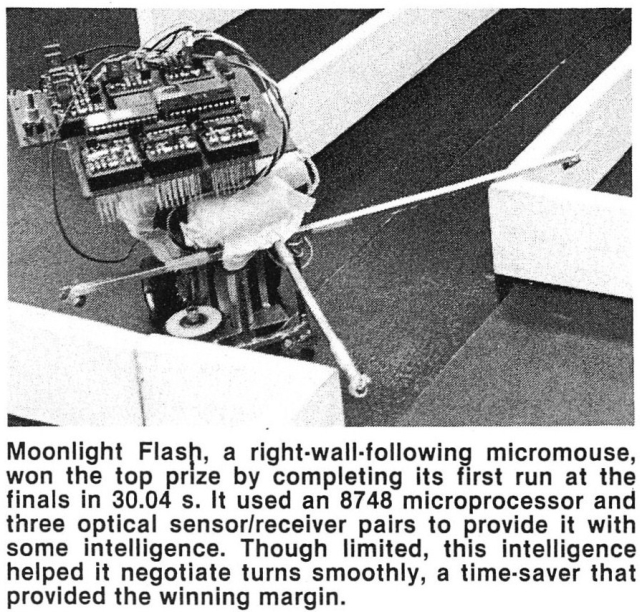
an optical right-wall-hugging micromouse entered by the Battelle team. Moonlight Flash won the grand prize of $1000 with a first run of 30.04 s, beating out Harvey Wallbanger, whose first run was clocked at 41.68 s.
Although the Moonlight Flash was not considered "intelligent," compared with the Moonlight Special and Moonlight Express — two other mlcromice designed by the same team — It did incorporate an 8748 microprocessor and memory that gave it just enough Intelligence for the winning margin For example, three forward optical sensors mounted on extended arms were used to provide "look ahead" capability to cut corners where possible. The microprocessor and optical sensors optimized the Moonlight Flash's turns at corners to cut down on running time. Whereas an ordinary wall hugger would make a turn at a corner, often slowing in the process and sometimes bouncing off walls, the Moonlight Flash did not require contact with the walls while rounding the corners and did not slow down.
Another feature of the winner that was not used at the finals (insufficient time prevented the incorporation of this feature) was dead-end blocking. With it, the mouse would have been able to sense ahead dead ends and mousetraps and avoid them. Moonlight Flash was designed to operate from two small dc motors to achieve a top speed of 63.5 cm/s Power was provided by three sub-C Ni-Cd rechargeable and four AA batteries.
To negotiate the maze perfectly — that is, to solve the maze in the shortest run — a mouse would have had to travel but 8 m from entrance to exit. Right-wall huggers would have had to travel 15.83 m while left-wall huggers would have had to endure a more punishing distance of 30.05 m.
In practice, only the Moonlight Express and Special made perfect runs (on their second and third trials). The $1000 grand-prize winner, the Moonlight Flash, solved the mazc in 30.04 s on the first run, 30.62 s on the second run and 29.78 s the third time around.
"It's been quite an experience," said one of the three designers of the Flash, Art Boland. "As designers of wall followers, dead-end blockers and shortest-path computers, we know the difficulties encountered in making a transition from one level of intelligence to the next. The number of entrants with plans for intelligence that didn't succeed is evidence that these transitions are more difficult than some people realise. The problem essentially boils down to one of control. For a mouse to be truly capable of learning a maze and making smart decisions about solving the maze, physical control ol the mouse must be both accurate and repeatible. No attempt was made by us to implement our learning algorithms for our micromice until our control software was good enough to accept the learning algorithms."
The Battelle Micromouse (-from Robots and Robotology – R.H. Warring)
The 'Micromouse', shown on the front cover (and Plate 4), is an intelligent robot with a microcomputer 'brain' and an ability to work out how to traverse a maze after just two trial runs. On the third run it goes from start to finish without bumping into a wall, or making a wrong turn. In this respect it is more intelligent than human beings and robot designers are working on how this type of robot can be used in a more sophisticated way — perhaps domestic robots to vacuum carpets and even run household appliances.
The Micromouse was built by researchers at Battelle's Pacific Northwest Laboratories in the USA. Its grey glass fibre body houses about £100's worth of parts — but it took something like 500 man hours to assemble and `debug' this super-rodent so that it could make 33 decisions each time it ran its 20-foot-square maze.
The mouse glides along on two main wheels driven by stepping motors — or motors which rotate the wheels an exact distance for each electrical pulse supplied them. The 'brain' counts the pulses to keep track of the distance covered.
Infra-red beams from light emitters on the underpart of the body are aimed at five sensors attached to arms extending from the upper body. The computer 'brain' stops the mouse when approaching walls or obstacles that interrupt the light beams.
On the first and second runs through the maze, the `memory' capacity of the brain gathers data about the maze boundaries and identifies and enters the location of all obstructions. This is then `processed' automatically to ensure an error-free run on the third attempt, because the 'brain' also has a capacity to work out how to respond under given conditions. For example, it signals `left turn' if the mouse encounters a wall in front and a wall on the right. The `brain', in other words, teaches itself the correct programme to follow.
Switch the battery off, though, and the brain's memory goes
blank. It is then ready to re-learn the course, or another obstacle course, in the next two runs.
Basically, although the Micromouse is really a 'scientific toy', it is a true robot and one which effectively demonstrates the potential of intelligent robots.
(Plate 4)