pdf – Popular Electronics October 1962
Bionics
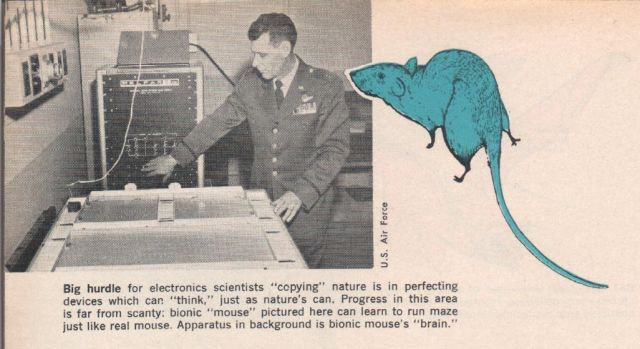
Bionic "Mouse." As mentioned earlier, RCA is working on a far more complicated moving-target indicator containing hundreds of neurons which operates on the same principle. But perhaps the most important piece of neural-bionic hardware to come out of the laboratories so far is a "bionic mouse" built by the Melpar Corporation. The "mouse" is housed in a small red plastic case about the size of a matchbox, mounted on wheels. A thin umbilical cord of control wires, suspended from a freely moving arm above, allows complete freedom of move ment and connects the mouse with its "brain" mounted in a relay rack.
Although the mouse looks like a toy, U. S. Air Force scientists working with it aren't playing. They are convinced that the mouse is the first step toward a completely new kind of thinking machine, as different from today's conventional computers as a superhet from a crystal set.
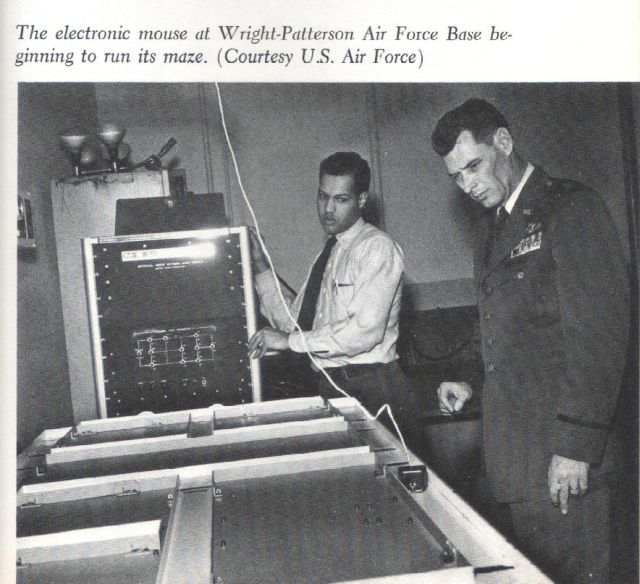
Not long ago, in a laboratory at the Wright Air Development Center in Dayton, Ohio, the author saw this "mouse" put through its paces. A technician placed it in a maze and flipped a switch. The mouse ran down alleys, turned corners, came to dead ends and backtracked, and tried other routes. Forty-five minutes later, after exploring scores of wrong turns and dead ends, it reached the end of the maze. The operator picked it up, and set it back at the beginning.
The second time round the mouse made fewer mistakes, and covered the course in about half the time. On the third attempt it ran through in eight minutes. Six tries later, it whizzed through the course in 45 seconds flat without a single error. The mouse had learned the maze, just as a live mouse would!
Bionic devices display true—though limited—intelligence in the animal sense. The bionic mouse has only 10 neurons in contrast to our 10 billion, but like an animal it can adapt to changing conditions and learn from experience. Change the maze, and it's confused—at first. But then it settles down and learns the new pattern.
A bionic "brain," in other words, can operate from generalized instructions. In the case of the "mouse," the only command was "learn to run the maze." Scientists call the mouse a self-organizing system which, on the basis of generalized instructions, figures out how to do the job. Human beings are self-organizing, too. A computer, on the other hand, has to be "programmed"—instructed in detail on every step. It must be told when to turn, when to store correct steps in its memory, and so on.
pdf – Generalisation Of Learning In A Machine – R. J. Lee (Maze learning machine) [I'm not sure where I sourced this from – It was downloaded quite some time ago].
SELF-SYNTHESIZING MACHINE R. J. LEE
Patent number: 3327291
Filing date: Sep 14, 1961
Issue date: Jun 1967 – find patent pdf here.
Although I've attributed this maze to Lee, the pictured version may actually have been made by E. B. Carne – see document ref below:
Title : ELECTRONIC REALIZATION OF FUNCTIONAL NERVE NETS.
Descriptive Note : Final rept., Dec60-Jan 62,
Corporate Author : MELPAR INC FALLS CHURCH VA
Personal Author(s) : Carne,E. B.
Report Date : JUN 1962
Pagination or Media Count : 80
Abstract : The self-organizing Binary Logical Network, a learning system using the reinforcement principal, is developed and used to formulate models of neurological subsystems. One of these systems, a maze running vehicle, has been constructed as an experimental and demonstration device. A detailed description of the maze system is provided. (Author)
MELPAR Maze:
From Man, Memory and Machines: An Introduction to Cybernetics by Corrine Jacker 1964. p71 [Note: If article is from Electronics World, then this is dated at 1963.]
The bottom article has it that the word artron was a re-name of reron (relay neuron 1955) done in 1960.
“There are various kinds of artificial neuron. One, Artron (RH-Artificial Neuron), built by the Melpar Corporation of Falls Church, Virginia, is a component of a very interesting bionic computer that operates a mouse who can learn to run a maze. This miraculous mouse is now being studied by the Air Force at their Wright-Patterson Air Force Base near Dayton, Ohio. The mouse begins its first time through the maze with no special instructions or tendencies to follow one part of the maze more than another. It finds its way through by a process of trial and error, bumping into blind alleys, retracing its path, and beginning over and over again.
Each time the mouse begins the maze again it has learned something about how the paths are laid out, and gets through in less time. Finally, it can make its way through the maze with no errors in a matter of seconds. This device is only one of a series of maze-running machines that have been constructed.
One interesting refinement that is being worked on now will teach the mouse to associate colors with right and wrong turns. Green will indicate a right turn, red a wrong one. After the mouse “learns” what the colors mean, it could be put into any maze and, if the turnings are marked, run through it quickly and without error the first time.
The practical applications of such a machine are numerous. It is possible that a bionic control system may eventually be able to pilot planes and function in any way where it can be guided by signposts such as colored lights.”
Book references an article, but it may not be the source.
Gilmore, Ken, “Bionic Computers.” Electronics World, March 1963. Pp 25-28, 63-64.
The mouse is tethered via an umbilical cord. The Brand name on the controller is “MELPAR”, and the inscription on the controller says “Artificial Nerve Network Maze Vehicle”.
Perceptrons, Regression,
and Global Network Optimization
John F. Elder IV
IPC-TR-92-10
9/4/92
(Extract from above pdf reference)
3.3. Smooth Logic as an Alternative
The path from perceptrons to polynomial nodes can be traced from the history of an early
“neuromime” company: Adaptronics, Inc. of McLean, Virginia. Adaptronics was formed in the early 60s by four young researchers from Melpar, Inc. (shortly after Air Force funding for “bionics” research jumped by a factor of 25 — see the survey of early techniques by Corneretto, 1960). One of the founders, R. J. Lee, inspired by (Ashby, 1952), had devised an artificial neuron called the “reron” (for “relay neuron”), descriptions of which were only privately published (Lee, 1954, 1955). The reron employed a noise source to switch between circuit states corresponding to six transfer functions, and biased the noise to reward (spend more time in) states with good error feedback. That is, the discrete logic function selected inside the reron was simply conditioned on the training data.
Use of a noise source, or random element, was apparently controversial to the scientific
community of the day. In fact, the idea first saw print as a Letter to the Editor in the July 1953 issue of (that "over the leading edge" monthly) Astounding Science Fiction! The letter was, however, recommended for publication by C. E. Shannon, who had explored a similar idea for "machine learning" (Shannon, 1951), though abandoned it 34 Perceptrons, Regression, and Global Network Optimization "… chiefly because it is rather difficult to trouble-shoot machines containing random elements. It is difficult to tell when such a machine is misbehaving if you can't predict what it should do!" (Shannon, 1953).
(Still, the controversial noise element was perhaps not really a factor in practical implementations, as the reron could have been set to the state most representative of the training data set.).
Given inputs a and b, the possible reron transfer functions were {0, a-, b-, ab- , ab,ab-}
(where “#- ” represents the NOT operation). In 1956, the other ten possible logic functions (including the notorious parity function, XOR(a, b)) were added at the suggestion of R. A. Kirsch (Gilstrap and Lee, 1960), and the node was renamed an "artron" for "artificial neuron". Shortly after starting Adaptronics, Lee's colleagues R. L. Barron and L. O. Gilstrap (living off savings for months) apparently discovered that bilinear multinomials (z = w0 + w1a + w2b + w3ab) could match all 16 logic functions of an artron. Not only that, but the polynomials provided a mechanism for interpolating and for using real-valued, rather than strictly binary, inputs. Hence, discrete computational elements were abandoned in favor of the richer real-valued polynomial nodes.