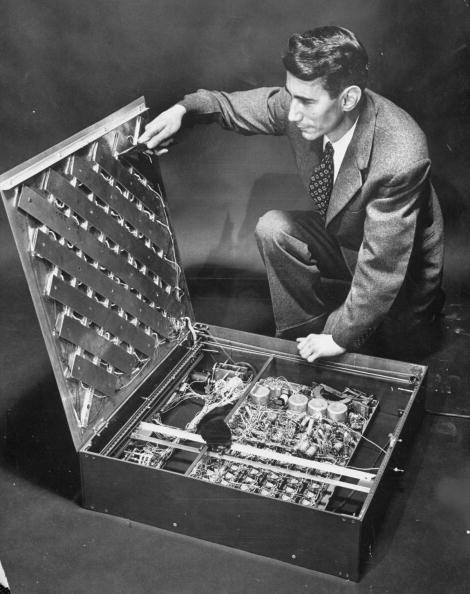
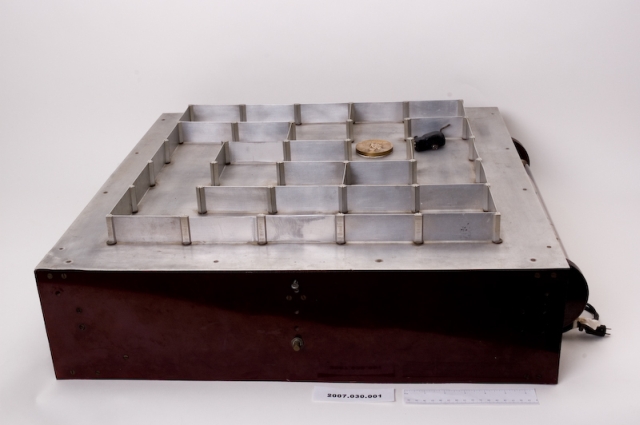
Internals showing N-S, E-W carriage, Relays, Uni-selector, motors, amongst other electrical components.
See 18 mins 51 secs in for 27 seconds.
See 9 mins 16 secs in for 32 seconds.
As the 1952 maze solver was recently at the MIT Museum.

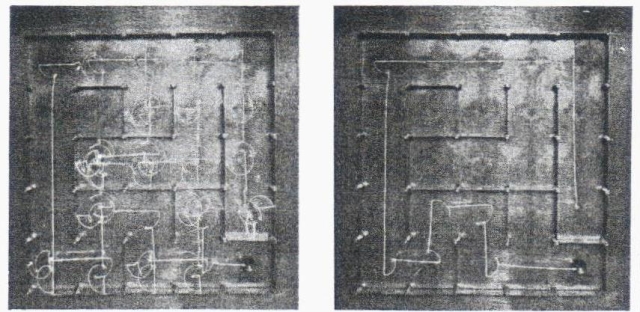
Picture from Life Magazine 28 July 1952. Top trace is showing the first pass of the maze solver learning the maze. The second run showing that it has learnt the maze and the mouse goes direct to the cheese.
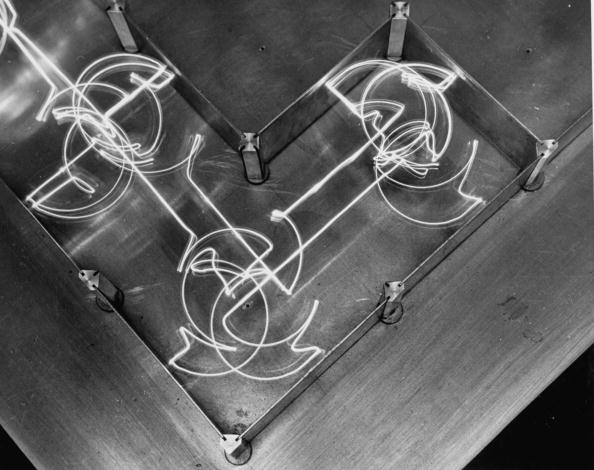
Detail of a trace showing to mouse rotations and making contact with the wall.
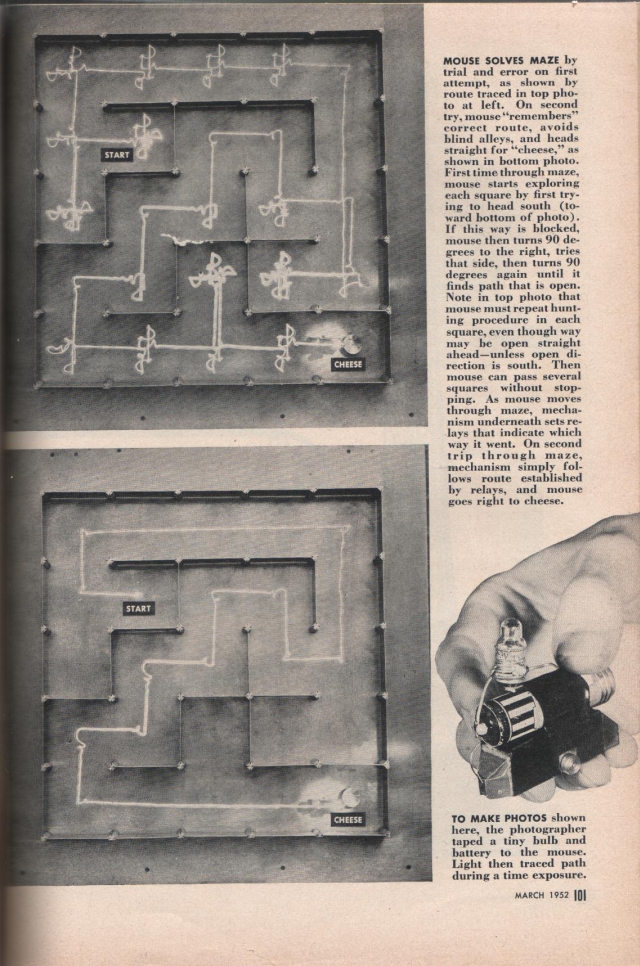
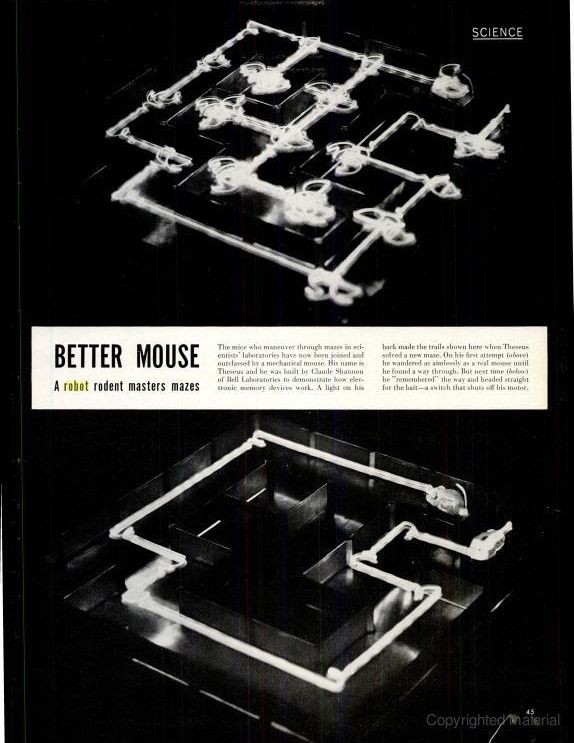
Picture above from Popular Science March 1952 showing another pair of time-lapse photos showing the learning of the maze in the first run, and the solving of the maze. A modified mouse is also shown. It included a lamp to ensure a trace showed in the time-lapse photography. Full pdf here.
The above maze photograph from Electrical Engineering July 1952. It took two minutes to learn the maze, and between 12-15 seconds to reach the "cheese" once solved.
Problem-Solving Electric Mouse Aids in Improved Telephone Equipment Research
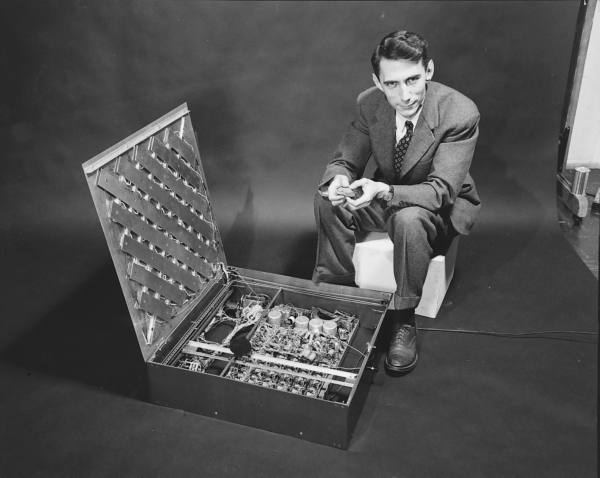
An electric mouse with a man-made super-memory is busily at work these days, repeatedly threading its way through a series of complicated mazes at Bell Telephone Laboratories. The handiwork of Dr. C. E. Shannon, a mathematician associated with the Bell Telephone Laboratories, Inc., the mouse uses for its "brain" some of the same kind of switching relays found in dial telephone systems. The reason it exists is to provide fundamental knowledge which will help improve telephone service.
The mouse, in reality a 2-inch bar magnet with three wheels and copper whiskers, can solve quickly more than a million million different mazes, learning each new one rapidly, then instantly forgetting it in order to be ready to learn the next one. Its goal is an electric terminal with a bell which rings when the mouse nudges it with its copper whiskers.
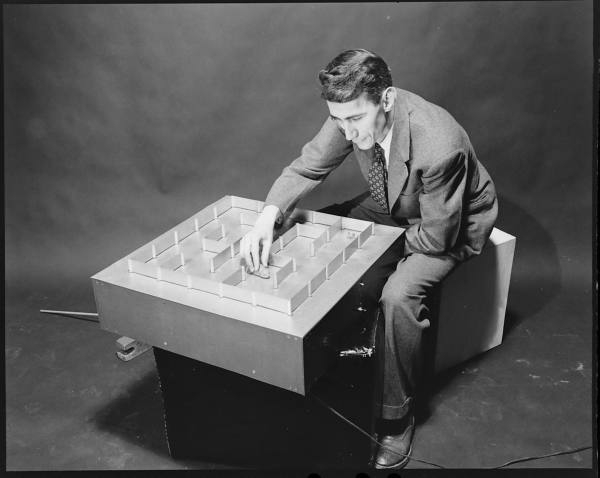
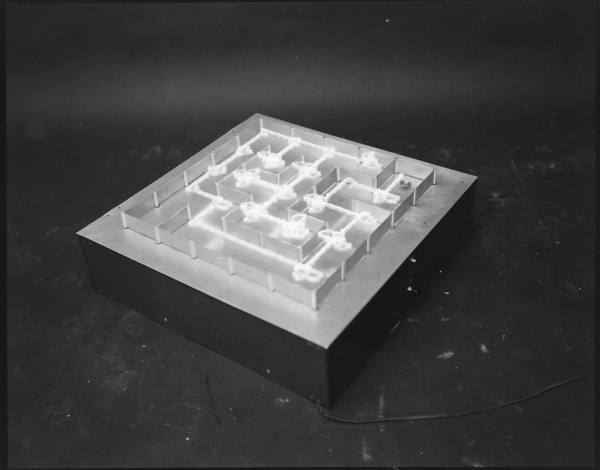
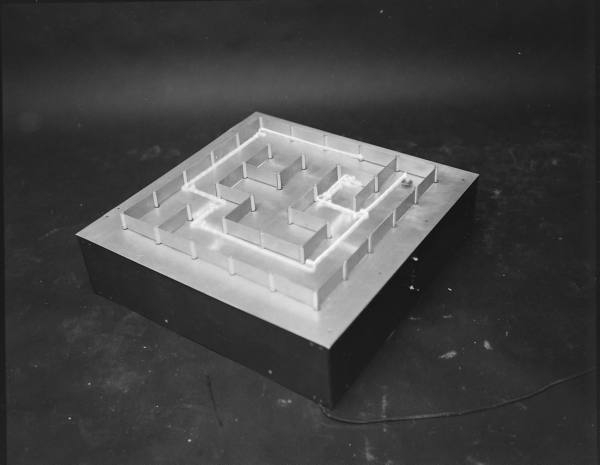
The maze is about half the size of a desk top. It has aluminum fences which can be rearranged at will in 40 different slots to create the hardest possible problems for the mouse. The mouse is placed at some arbitrary point in the maze and the goal at a different arbitrary point. After a brief pause to get its bearings, the mouse goes up and down corridors, bumping into walls, backing up and turning, and exploring until, a minute or two later, it reaches its goal and rings the bell.
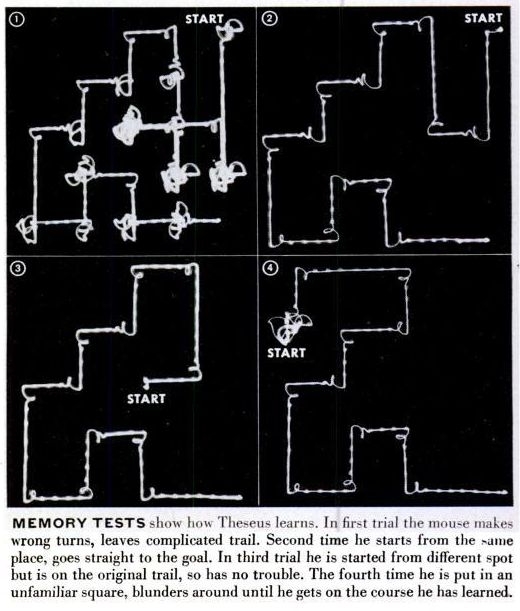
Having learned the correct path to the goal, the mouse now can be set down at any point that it visited during its explorations and, without making a single false move, it will proceed directly to the goal in 12 to 15 seconds. If it is placed in a part of the maze not previously visited, it will explore until it reaches a known part and then move directly to the goal.
After this, if the maze is altered, the mouse will have to learn the new paths by further exploration, but it readily will remember those parts of the path which remain unchanged.
This is the way the mouse works. When it is set down on the metal floor of the maze, it trips an electric switch which signals its position to a mechanism under the floor. A motor-driven electromagnet moves swiftly to the spot directly beneath the mouse and from then on holds it in a magnetic grasp. The magnet turns through a 90-degree angle, carrying the mouse with it, then guiding it forward. If the mouse hits a barrier and detects, by means of its copper whiskers, that it is in a dead end, the magnet will back away, shift the mouse to another direction, and start it forward to try again to find an open path. It keeps trying until it finds the way to the goal. Then it remembers the successful path and can solve the maze directly without error.
To regulate the sequence of movement, a "programming" circuit has been built, consisting of 40 electric relays. Another part of the mouse's "brain," which serves as its memory, contains 50 relays. Two small motors complete the equipment.
By working with such problem-solving equipment, it is hoped that more will be learned about what man can do with machines. Many of the techniques by which machines are able to remember are currently being applied in the Bell System in dial switching, in automatic accounting, and in other equipment.
The real significance of this mouse and maze, lies in the four unusual operations it is able to perform. It has the ability to solve a problem by trial and error means, remember a solution and apply it when necessary at a later date, add new information to the solution already remembered, and forget one solution and learn a new one when the problem is changed.
The above two sequences are interesting in that the 'learnt' maze is altered (2nd panel before the finish), and the mouse is still capable of re-learning the change and solving the maze.
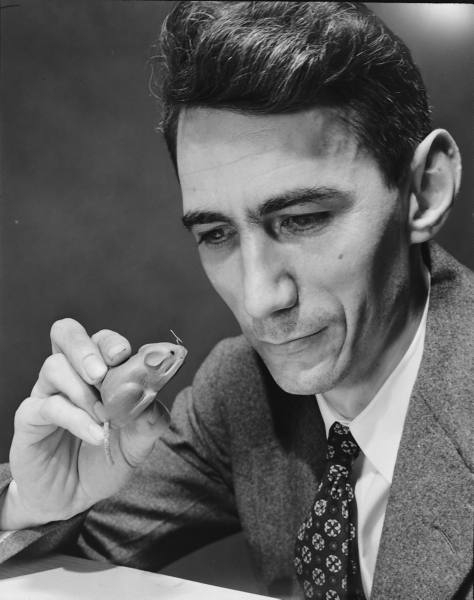
Shannon with the mouse.
The original mouse was carved from wood hollowed out to take a two-inch magnet bar of aluminium, nickel, and cobalt. It has two beady, button eyes, three small brass wheels for legs, and an pipe cleaner for a tail. Two copper whickers guide it through the maze to the "cheese" which is an electrical terminal that rings a bell when toughed by the whickers.

Bell built several versions of Theseus for demonstrations of the technology. One of them was known as Philbert as used by Southwestern Bell Telephone Company. As late as November 1976 they were still being demonstrated.
Time-Life have about 70 images of Shannon, the mouse, and time-exposures of the maze. They can also be found in Google images by adding the option source:life .
Hi Johan, can you tell me how can I construct a similar work? I study electrotechnical and I can understand the process I think. Thanks.
Ah, I can’t believe I found this site. Such a mouse in a maze is exactly what I build in the 60’s. My best version was with a light, rather than a mechanical mouse, that would work its way through the maze, changeable with removable fences. Each square had a light and they would turn on and off as it found its way. I wish I had made pictures in those days.