
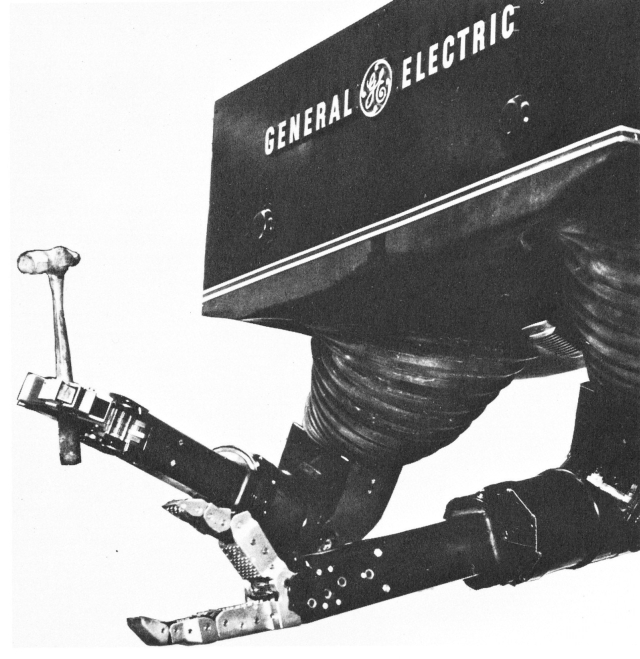
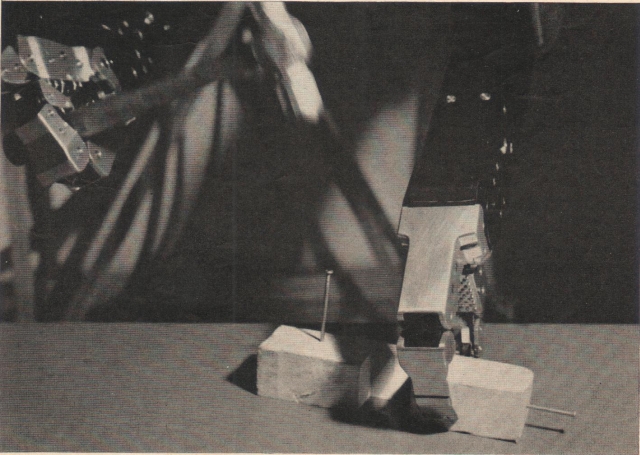
At the debut press conference, Handyman twirled a hoola hoop and wielded a hammer.
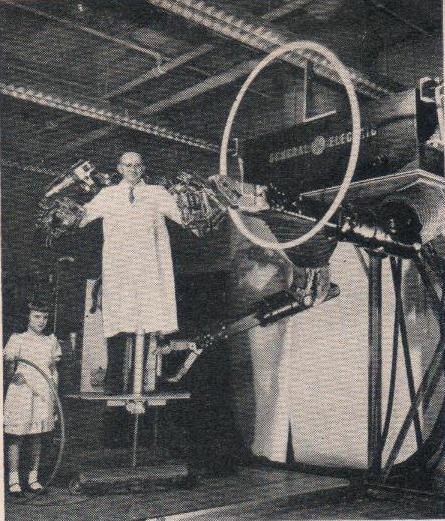


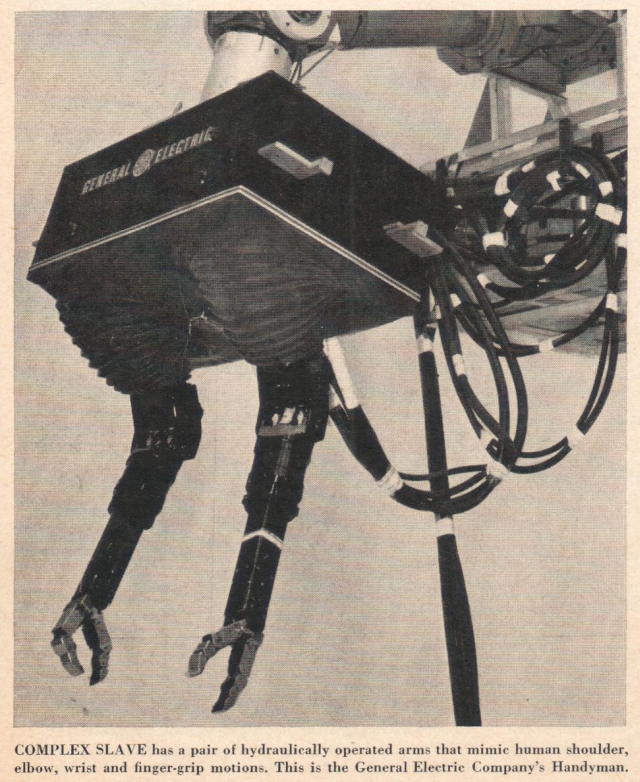
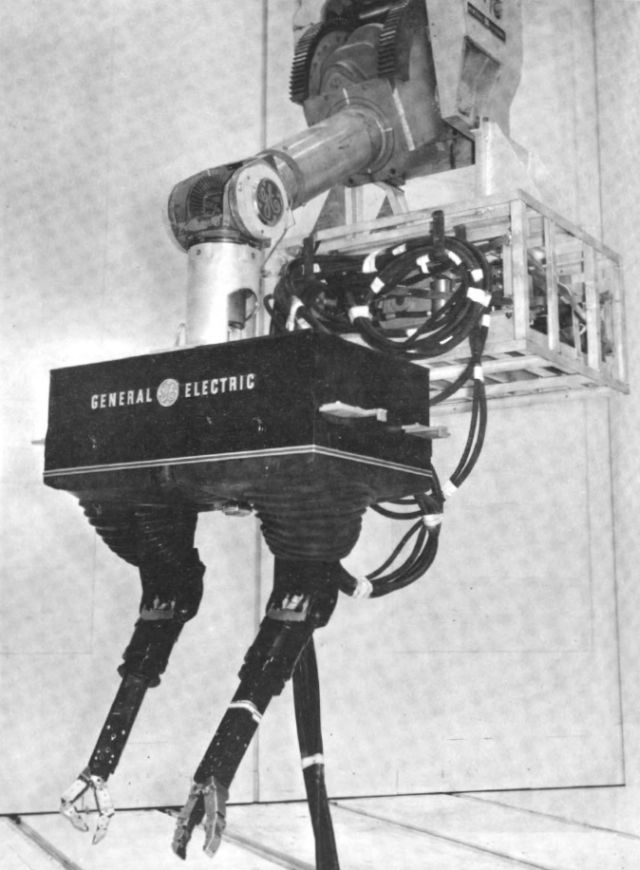
Handyman slave station being held up by a G.E. "O" Man.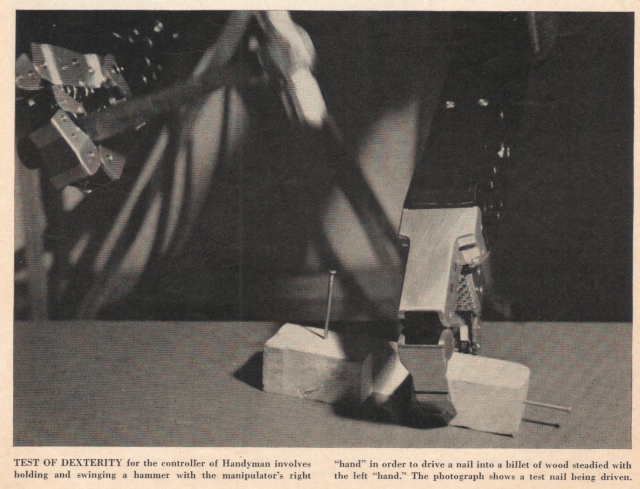

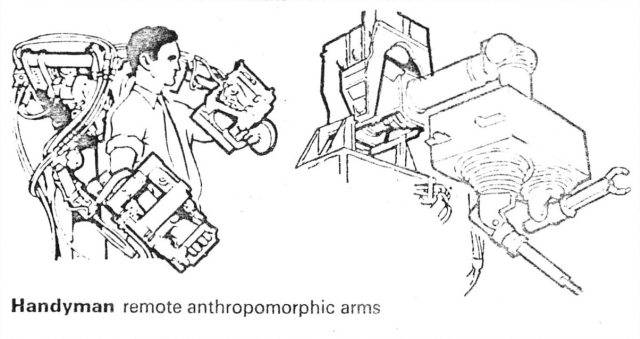
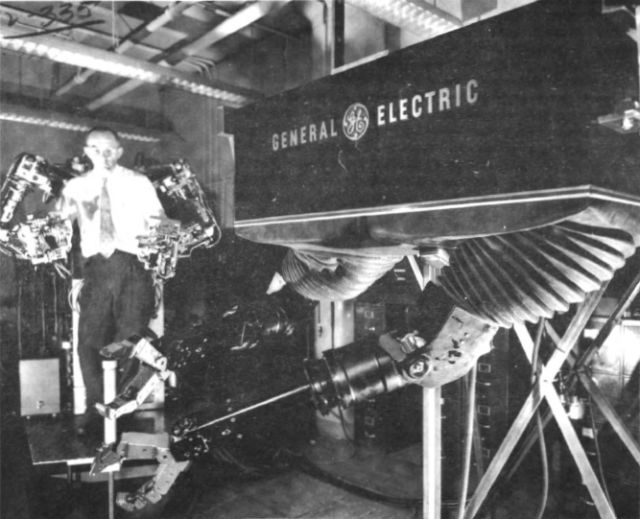
Handyman was built between 1958-59 at Schnetectady, New York for the joint AEC-USAF Aircraft Nuclear Propulsion Program by Ralph Mosher.
The idea of CAMs originated nine years ago when the General Electric Co. was in need of an especially delicate manipulator to handle experiments with an atomic aircraft engine. Manipulators with the theoretical dexterity to turn screws, fit parts and assemble close-tolerance components were available. But they always turned out to be clumsier and more inefficient than expected. The company asked Mosher, a mechanical engineer in the General Engineering Laboratory, to try to design a manipulator that could handle the task.
"I realized that after a certain point improvements in mechanical dexterity added little to a manipulator's performance," says Mosher. "So I began wondering why a human being is so efficient and a slave robot so awkward. Soon it was obvious that the manipulator's operator was missing what he ordinarily experiences, a sense of feel."
Mosher toyed with several methods of restoring a tactile sense to a manipulator's operator before he hit on force feedback. The idea itself wasn't new; power steering, for example, which became popular in the early 1950s, uses the same principle. But no one had ever applied it to a high performance slave robot. When Mosher did, the difference was dramatic. "We didn't just make a better manipulator," he says. "Adding touch created an entirely new kind of robot."
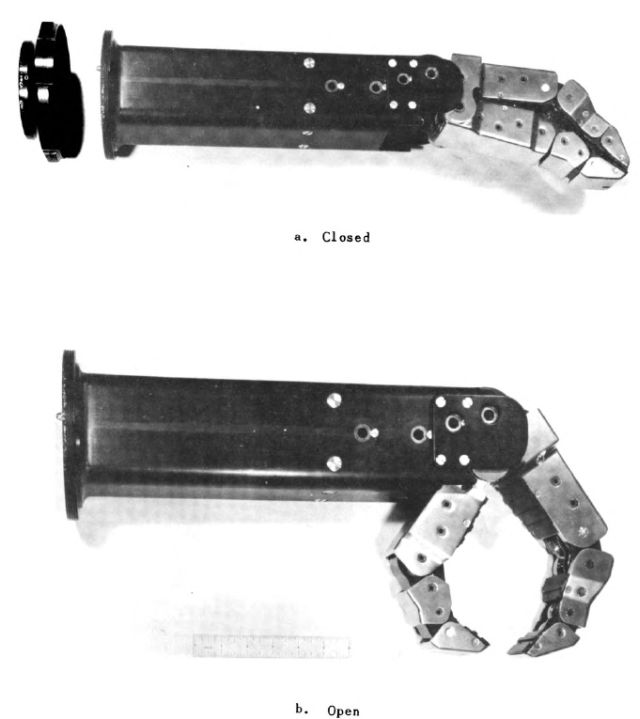
From Mosher's work came Handyman, a pair of arms with pincer hands sensitive enough to pack eggs, strong enough to crush golf balls, and adroit enough to light a match. The robot proved to be the most effective linking of man to manipulator ever built.
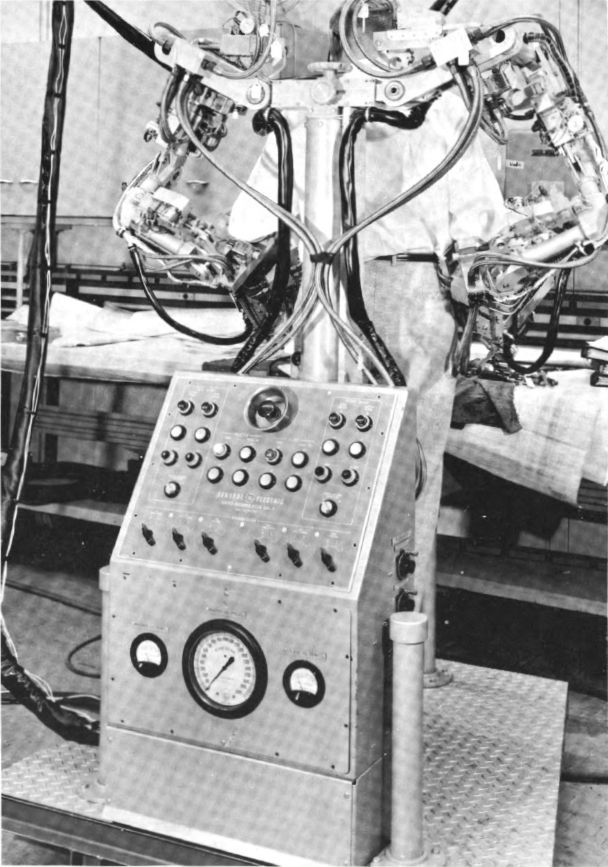
But it did have serious drawbacks. One was the electronic force feedback system, which used sensors in the robot's pincers and arms to pick up and relay stress. The electronic equipment was bulky and far too complex to be practical. In addition, the cost of the servo mechanisms and follower racks was prohibitive for anything but specialized projects. General Electric put Handyman and similar CAMs to work in its own plants. But their complexity and expense nixed plans for continued development.
For a further description on Force and reflective feedback, see post here.
Video Clip – there is a video clip, but, alas, no preview is available. Here's the clip description:
Mechanical Man Clip Description:
Schenectady, N.Y. — Manipulator-Mechanical ManCut Story:-Three shots Robot moving arms, 2 shots man operates same, Med Robot removes pipe from tube, Med operator, Med Robot twirling hoop, stops & holds hands together over head. Various shots Manipulator in action.
"Handyman"-Mechanical Man.
(18776) (NXO 2518) 16mm
Story number: 147-183
I found another video clip that has small snippets from the above video clip, but just showing the claw only.
Sadly it has been removed from Youtube.

Handyman has been made into a graffiti stencil.
Hi Ruben,
Thanks again for your amazing site. I reference it and tell people about it regularly. I used it extensively two years ago reserching a lecture on my project Prosthesis: The Anti-Robot, which is going great by the way!
I was wondering, how do you think one might get their hands on the video you mention in the Handiman post? Who would you talk to?
Best,
Jonathan