![]()
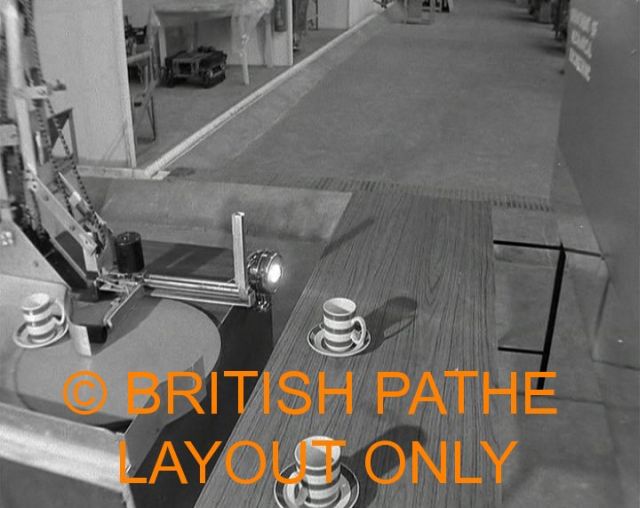
"Working model of a table-clearing robot [Mk 2] designed to test the present-day feasibility of principles required for the house-working robot and other machines. The model has one 'sight' and two 'touch' sensors which enable the mechanical arm to pick up objects and place them on the rotating, clearing tray on top of the machine."
INVENTORS' EXHIBITION

2065.27 | INVENTORS' EXHIBITION. London 13/01/1969
M/S table clearing robot. M/S as it lifts cup up from table. C/U cup being lifted from table and placed to one side. M/S as cup swings round to make room for another.




THE HOUSE-PROUD ROBOT
Clearing the table after a meal is a task which can be given to a robot. This one, like many other robots, does not have a human form like its counterparts in fiction. But it does its job well.
![]()
1. The mug is seen by a photoelectric "eye" and the "hand" is directed towards it.
2. Controlled by pressure sensors, the hand grips the mug firmly.
3. As the hand retracts, it puts the mug on a rotating turntable.
![]()
4. By its rotation, the turntable clears the mug out of the way. Far right: a close-up of the robot housemaid in action.
![]()
This table-clearing machine has a photoelectric eye which detects objects. This directs linkage; closes on them
lifts them back to the turntable.
![]()
![]()

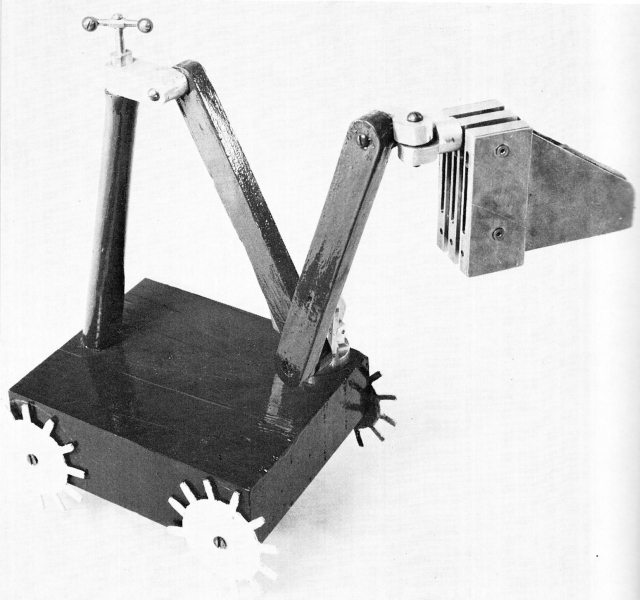
Earlier Mk 1 version of Table-clearing Robot
![]()
![]()
Meredith Thring with his models of Domestic Robot

Cartoon from New Scientist, March 1963.
See other early Domestic Service Robots here.