
Source: MECHANIX ILLUSTRATED August, 1949
Truck Walks on Wheels
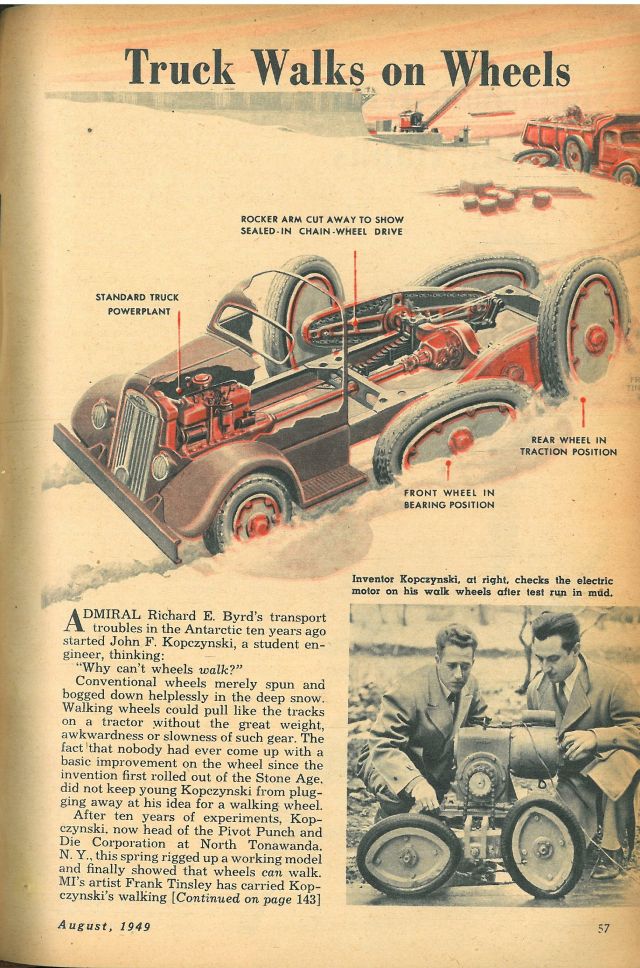
ADMIRAL Richard E. Byrd's transport troubles in the Antarctic ten years ago started John F. Kopczynski, a student engineer, thinking: "Why can't wheels walk?"
Conventional wheels merely spun and bogged down helplessly in the deep snow. Walking wheels could pull like the tracks on a tractor without the great weight, awkwardness or slowness of such gear. The fact that nobody had ever come up with a basic improvement on the wheel since the invention first rolled out of the Stone Age, did not keep young Kopczynski from plugging away at his idea for a walking wheel.
After ten years of experiments, Kopczynski now bead of the Pivot Punch and Die Corporation at North Tonawanda. N. Y., this spring rigged up a working model and finally showed that wheels can walk.
MI's artist Frank Tinsley has carried Kopczynski's walking [Continued on page 143]
[Continued from page 57]
idea a step farther by picturing on page 57 a design for a truck that walks on wheels.
That ambulating vehicle is the answer to the Antarctic problem that stalled Admiral Byrd in the cold. Note how easily the truck mushes along through the deepest snow—no clogging tracks, no frantic spinning.
Smooth riding on those big, egg-shaped rear wheels looks as tough as roller-skating on a railroad bed. The egg wheels on each side of the track, though, are mounted on the ends of a rocker arm and chain-geared together so that when one wheel flips up on its pointed end, the other flops flat on its side. The pair of wheels on the opposite rocker arm are set up in reverse on a standard truck axle that served as the pivot for both rockers.
As the wheels flip-flop up and down, the rocker arms seesaw sharply but the trucks supporting axle moves forward on an even keel. Actually this truck rides twice as moothly as a round-wheeled vehicle. For when a walking wheel steps up on a foot-high bump, the axle rises only six inches, since its halfway between the ends of each rocker.
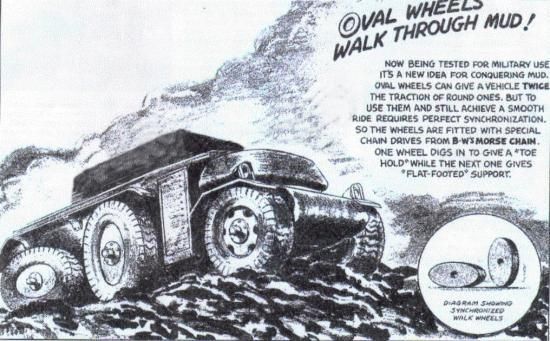
Unlike round wheels, the egg-shaped rollers don't spin themselves into a rut. The pointed ends dig into soft terrain and help provide double the pulling power of conventional wheels. In a recent test, Kopczynski buried his "walk wheels" out of sight in a pile of dirt When he switched on the power for the model's electric motor, the wheels started "walking" and quickly pulled away into the open.
The new wheels equal the track-laying gear-of tanks and tractors in pulling and supporting heavy weight on soft surfaces. However, they are much lighter, faster, easier to handle and cheaper to manufacture and service that the crawlers. Then, too, a track layer rips up good roads with its cleats as it plods awkwardly over the hard pavement. When Kopczynski tried out his one-fourth-scale model in a small vehicle with round front wheel the soft-tired walker ran as smoothly at 2 mph as a new Rolls-Royce.
Kopczynski's odd wheel is a natural for tractors, farm and road equipment, and heavy duty trucks that must leave the paved road With walk wheels, combat cars, gun carrier and other military vehicles can speed swiftly over open roads, then march across country through mud, snow or rough terrain with no worries about getting stuck in No Man's Land For thousands of years we've been rolling along on the same old round wheel. Young John Kopczynski, though, finally made that wheel take a walk—and proved he was just the man to put the old rounder in better shape.
Source: Unusual Locomotives.

M7-Alice-Chalmers with Elliptical Wheels. Source: See here.
Fred W. Crismon’s “U.S. Military Wheeled Vehicles,” as I have so many times before, and Crismon came through again:
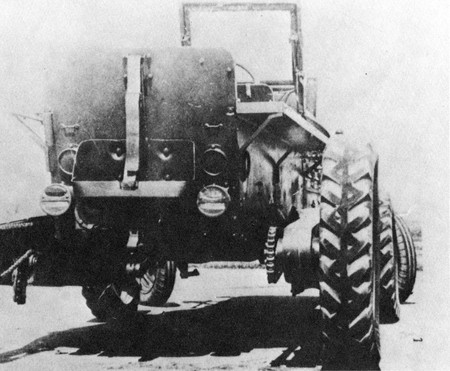
This peculiar machine, seen here from the right rear, incorporated one of the strangest concepts ever tried on a wheeled vehicle. The idea was that if the ground pressure could be changed regularly as the wheel turns, and would do so in relation to the other wheels on the same and opposite side, increased traction would result. Four tires and wheels were specially built which were ellipsoidal in circumference, and they were mounted offset at 90 degrees on each side, as well as being offset right side to left side. A front axle with normal tires was used for steering.
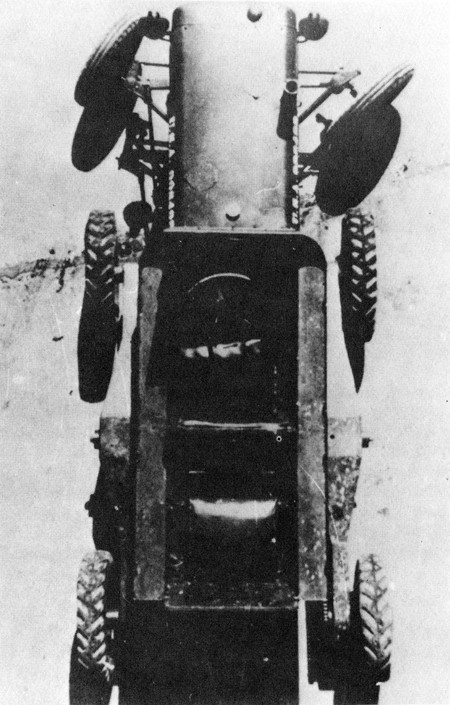
This top view of the ellipsoidal-wheeled experimental vehicle shows the unusual configuration. Suspension was of a fabricated walking beam type, and chains drove the four rear wheels. The outer diameter of the inflated tire was approximately three inches greater across the widest section than across the narrowest. A T26E4 tracked snow tractor (Allis-Chalmer) was modified in 1946 to test the concept. It was a dismal failure in that it not only failed to provide better mobility, but operation over any but the softest soils pitched the operator around unmercifully. But the Army will try anything once.
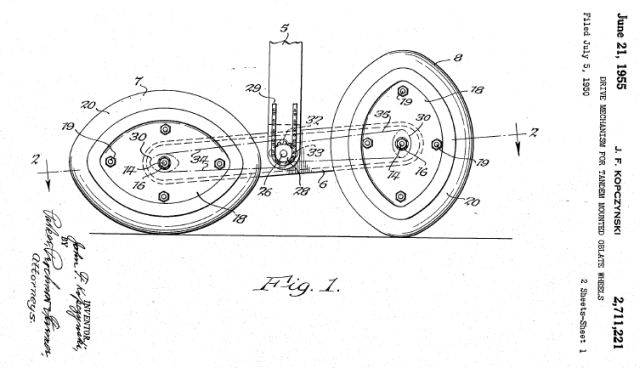
Patent number: 2711221
Filing date: Jul 5, 1950
Issue date: Jun 21, 1955
See full patent details here.
See all Walking Wheels and Walking Machines listed here.