Source: Popular Mechanics, Dec 1957.
Although I've seen dates suggesting the Planobot was around since 1955, The first dates I've seen in publications start in 1956. The patent itself was filed 13 Mar 1957.
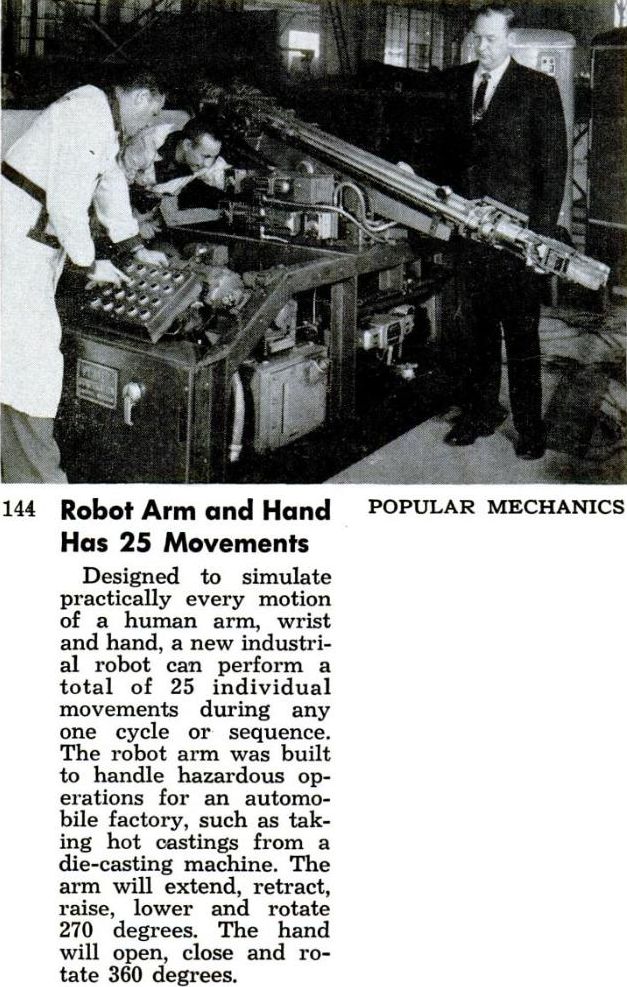
"Planobot is for automationeers. It's a transfer device (Planet Corp., 1820 Sunset St., Lansing, Mich.) with five basic motions: Grasping device on horizontal arm (1) opens and closes, (2) rotates 360 deg.; arm will (3) extend or retract, (4) raise or lower and (5) rotate 270 deg. in a horizontal plane." – Factory – Volume 115 – Page 78 by George Worthington – 1957
In 1957 the "Planobot" debuted at St. Erik's International Trade Fair, Stockholm, Sweden. It was referred to as an "Universal Transfer Device".
In 1980 the Planet Corporation re-entered the robot market with the "Armax" industrial robot (robot arm_with maximum capability) and created Armax Robotics. The Armax IR carried a 150 lb. weight in either point-to-point or continuous path modes and used walk-through programming.
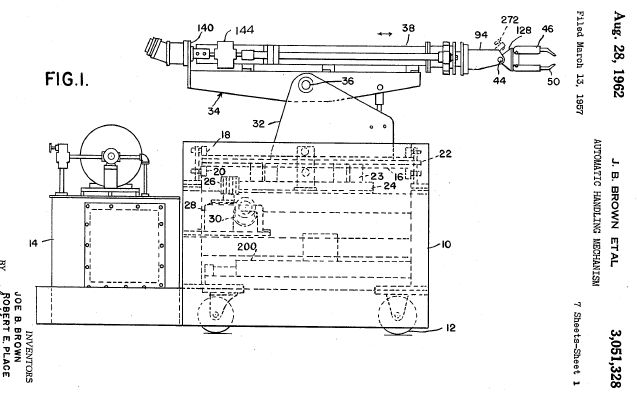
Joe B. Brown and Robert E. Place
Filing date: Mar 13, 1957
Issue date: Aug 28, 1962
166 Practical Robots
Practical Robots 167
The Planobot
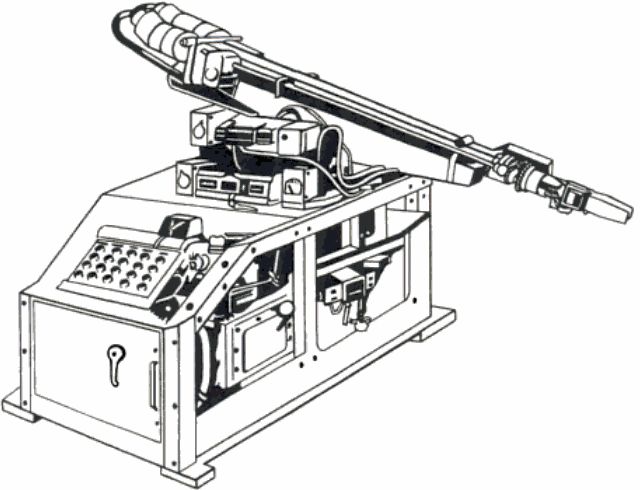
An early programmed robot arm was the Planobot, which was manufactured by the Planet Corporation of Lansing, Michigan. The hand could be moved in a radius of between about 1 m and 1.8 m and the tilt motion of the arm was up to 60°, so that this robot device could be used for loading and unloading a wide range of machine tools and similar machines.
The hand was fixed at the end of a long straight arm which could be extended, tilted up and down and rotated through 360°, about the vertical axis. In addition, the wrist at the end of the arm could be rotated. A total of 45 different positions of the hand could be stored in the command console in the form of the positions of the settings of 45 groups, each consisting of five potentiometers. In each of these groups four of the potentiometers were used to store the required position of the arm and hand, while the fifth potentiometer was used to set the time constant of a resistor–capacitor circuit controlling the length of the dwell of the stepping switch which moved the control from each set of five potentiometers to the next.
This master stepping switch had six switch-arms or levels and 45 different sequential positions. The error between the required position as set on the potentiometer and the actual position of the arm was amplified and so used to operate relays which control the valve solenoids which determine the motion. Hydraulic motors were used for the rotary motions, while double-acting cylinders were used for ram, tilt and clamp operations.
Rapid swing traversing of the Planobot was at a rate of 90°/s, corresponding to a maximum movement of about 3m/s at maximum radius. When the arm approached within about 4 cm of the final position, the speed of movement was slowed down to about 8 cm/s to limit overshooting. The in-and-out ram movement of the arm operated at a speed of about 30 cm/s.
The Planobot was programmed by setting the four control potentiometers at each position so that the hand reached the required location. The switch was then stepped to the next position and the setting operation carried out for this step.
The time control potentiometer at each position was initially set to the maximum time, so that the initial sequencing operation was slow However, if the movement was found to be satisfactory, then the time control potentiometers could be adjusted to reduce the dwelling time at any required steps, and so to speed the over-all action. It was possible to continue any required motion through two or more steps while changing other motions at each step. In this way a quite smooth motion is obtainable. As an example, the hand can retract until it clears an obstacle, and then continue to retract while it swings sideways after the obstacle is cleared.
I remember that Frank adopted about 1969. Having worked For him in St. Petersburg we would have lunch together out on the beach. We would return to his house for other refreshments.He was a great guy and I often wondered about his business as the St. Petersburg office closed. 850-872-7416
My dad Frank Groeneveld is the man on the right . Did you know him ? He died in 1974 . I didn’t really get to know him I was only 5 yrs old then . Could you tell me about him? My phone # is 205-873-0115 .