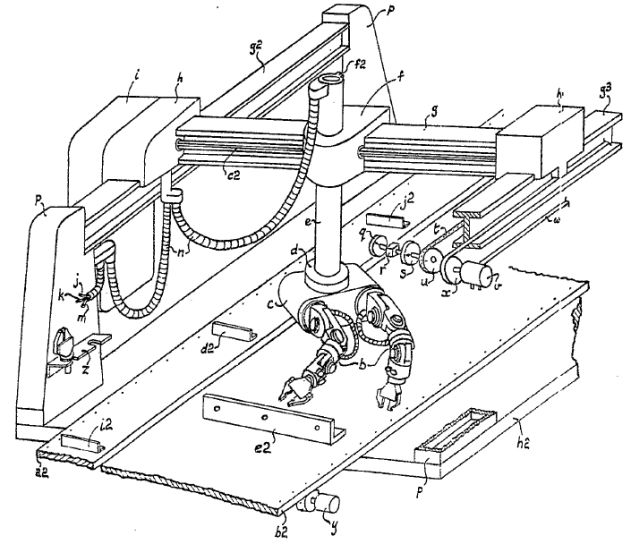
Another early patent that looks surprisingly modern was granted for a robot called 'Improvements in or relating to Positioning or Manipulating Apparatus' invented by Cyril W. Kenward. The British patent was filed March 29, 1954 and was published August 21, 1957, and preceded George Devol's first robot patent by several months. It is an interesting parallel that Britain, birthplace of the machine tool industry, would also pioneer the idea of robotics.
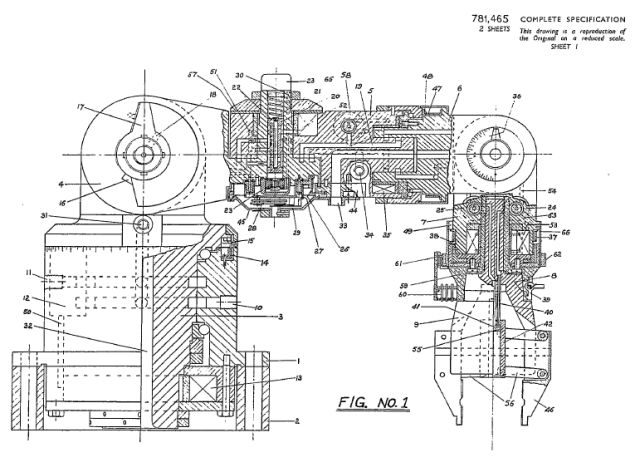
Hydraulically powered, this dual arm, gantry mounted robot was years ahead of its time. The patent even speaks of robot self-replication. Featuring detachable grippers and gantry mounting, it could well be used as an illustration for a current research contract proposal. Another key feature of this design was complete internal porting of hydraulics and internal wiring, problems that went unaddressed in early hydraulic robots and often is not achieved in modern day hydraulic robots. Figure above shows the six-axes, hydraulically powered arm in cross section.
Text source: Robot Evolution: The Development of Anthrobotics By Mark E. Rosheim, 1994
Interesting that some comments made around this patent is that it was not successful. It should be noted that the patent was only a British patent, and not filed in the US or other countries. When the "Versatran" and "Unimate" robots were to be imported into the UK in 1967, these clearly infringed the Kenward patent. It was reported at the time that this matter was resolved by a "cash payment". Further, the author of the article, Douglas Hall, adds "It did, however, illustrate how people in britain often have good ideas for inventions but then have to sit on the sidelines as noone is prepared to back them".
I can't believe that robotics dates back to the mid 1950's. This isn't sci-fi robotics either, it is the beginning of the very sophisticated robotics used in the modern machine tool industry.