scanning – a form of behavior (sniffing, looking, listening, palpating) by which a sensory stimulus is sought or expected, and which is guided by an expectancy of input instead of a future internal state (goal). The search must be broad in the sense of looking everywhere, but narrow in the sense of being specific as to the characteristics of the anticipated stimulus, which implies that the search is guided by memory of past experience, as distinct from a predicted goal or automatic guidance by a set point. – from Biographical Sketch: W Grey Walter by Walter J Freeman, Encyclopedia of Cognitive Science (2003)
Discussions on Child Development (In one Volume 1971) Ed. by J. M. Tanner & Barbel Inhelder, p31
When asked "How does it keep after the light ?"
GREY WALTER responded:
"If you have a scanning device, a rotating photo-cell, then once it gets on to a line it will tend to pick up that line again within a reasonable time. The same unfortunately is true of self-guided missiles. If a missile is aimed at London and interrupted by some counter-force, it is easy to make it take up the line again, after the perturbing force has been circumvented. This is characteristic of quite a simple system without storage."
and again p34-35
"Fig. 5 [not shown here] has a lesson for the philosophers among us, if there are any. This is the solution by a two-element model of what has been called the dilemma of Buridan's Ass. The dilemma, as conventionally stated, is that of a creature which does not possess free will, when it is faced with two exactly equal and equidistant stimuli; it is then not able to choose between the two alternatives and will die of hunger before it decides which of these two alternatives to accept as a stimulus.
This particular model has a scanning device in order to have freedom of movement. It also has a very interesting property in that it lives in Bergsonian and not Newtonian time. Newtonian time is reversible; the Newtonian solar system could be run backwards and it would be exactly the same as it is now. But Bergsonian time cannot be run backwards; all organisms live in Bergsonian time; time for us, as we all know, has an arrow. That arrow points to the grave;
that may be deplorable, but it has one important advantage, that with it we can solve Buridan's dilemma. We have the creature again starting at the top of the picture. There are two candles which are about equidistant ; they may be precisely so. The creature is released at the top and it happened to see the light on the left first. The spatial symmetry is not also symmetrical in time, so the effect of a scanning machine is to solve all dilemmas which involve symmetries in space. One of the signals must be seen first, and the one which is seen first is the one visited first. The creature explores the possibilities; when it gets close to the first light its moderation mode is invoked and it wanders across and does the same thing with the other light; it forms a figure-of-eight diagram. So our two-element model, which is essentially a reflexive mechanism richly inter-connected with a scanning device, can solve the dilemma of Buridan's ass, and would not die between sources of nourishment."
Wartime goal-seeking missiles (Craik, Wiener) vs Pavlov's Reflex approach (Grey Walter).
The Living Brain, W. Grey Walter (1953)
“ The first notion of constructing a free goal-seeking mechanism goes back to a wartime talk with the psychologist, Kenneth Craik… When he was engaged on a war job for the government, he came to get the help of our automatic analyser with some very complicated curves he had obtained, curves relating to the aiming errors of air gunners. Goal-seeking missiles were literally much in the air in those days; so, in our minds, were scanning mechanisms. Long before (my) home study was turned into a workshop, the two ideas, goal-seeking and scanning, had combined as the essential mechanical conception of a working model that would behave like a very simple animal.”
Given that inspiration, Walter was later to write
“ the model may be made into a better ‘self-directing missile’ by using two photo-cells in the usual way, but it will be a worse ‘animal’, for though it will keep more closely to its beam it will have to be aimed roughly in the right direction and will not ‘speculate’ – that is, spy out the land – nor will it resolve Buridan’s dilemma.’
Survey of Cybernetics ed. J. Rose (1969)
For many years, Wiener's thinking and my experimentation kept converging and overlapping, almost without any direct collusion or collaboration. His notion of scansion by the alpha rhythms matured at almost exactly the same time as we had observed some sort of space time transformation in analyses of real brain rhythms. Oddly enough, the artificial animals that I built at this time incorporated an elementary scanning receptor, white his model did not. My `tortoises' are not confused by the dilemma of Buridan's donkey, while his `moth' would trundle confidently midway between two targets, missing both. Wiener refers to some of the differences between the two models in both The Human Use of Human Beings' and in the second volume of his autobiography,2 but without apparently appreciating the significance of space time transforms as a possible resolution of the `determinism free will' dilemma. This oversight seems all the more remarkable because of his intense interest in the reduction of philosophic verbalisms to operational hypotheses.
From The Human Use of Human Beings Norbert Wiener (1950 ed.)
I have recently received a letter from Dr. Grey Walter of the Burden Neurological Institute at Bristol, England, in which he expresses interest in ’the moth’ or ‘bedbug,’ and in which he tells me of a similar mechanism of his own, which differs from mine in having a determined but variable purpose. In his own language, ‘We have included features other than inverse feedback which gives to it an exploratory and ethical attitude to the universe as well as a purely tropistic one.’ The possibility of such a change in behavior pattern is discussed in the chapter of this book concerning learning, and this discussion is directly relevant to the Walter machine, although at present I do not know just what means he uses to secure such a type of behaviour. The moth and Dr Walter’s further development of a tropism machine seen to be at first sight exercises in virtuosity, or at most, mechanical commentaries to a philosophical text.’
Later, from Weiner’s expanded 1952 edition
“here let me mention some earlier machines of Dr. Walter, somewhat similar to my ‘moth’ or ‘bug,’ but which were built for a different purpose. For these phototropic machines, each element carries a light so that it can stimulate the others. Thus a number of them put into operation at the same time show certain groupings and mutual reactions which would be interpreted by most animal psychologists as social behaviour if they were found encased in flesh and blood instead of brass and steel. It is the beginning of a new science of mechanical behaviour even though almost all of it lies in the future.’
from The Physics and Chemistry of Life, A Scientific American book, (1956), p254
….. In a TV set, scanning of the field goes on continually whatever the picture may be; in certain radar sets designed to control artillery and in many target-seeking projectiles, a scanner is set to search for targets, but once an echo has been received the scanner stops and swings the gun or missile into a position of best attack. This simple system was incorporated into the toy robot, Machina speculatrix, which we made years ago to see how "scanning" would affect behaviour. In systems such as these, the more active and excited the system is, the less regular and rythmic the scanning cycle becomes. So perhaps within our heads we carry a bundle of target-seeking tissue-in origin primeval, but in function as penetrating and as precise as any imagined, even in the realms of science fiction. Here we can discern at work the organ of selection and imagination, first stages on the road to learning, understanding and foreseeing the shifting patterns of the outside world-and all contained in a cupful of tepid, pinkish-gray, electric jelly.
…..
from The Tortoise Against Modernity, Andy Pickering (2001)
The tortoise was thus a homing device, capable of pursuing its target, a light source, in a cluttered and difficult terrain. Here we can recognise a version of the basic cybernetic connection between purpose and feedback from the environment, and one is immediately reminded of the primordial referent of Norbert Wiener’s cybernetics—the autonomous antiaircraft weapons system Wiener sought to construct during World War II (Galison 1994).8 Two differences between Walter’s robots and Wiener’s are worth noting. First, the tortoise was more active and lively than Wiener’s device; the tortoise would prowl around, scanning the horizon for lights, while Wiener’s autonomous weapons merely waited for a target to present itself. And secondly, while Wiener’s ‘guns’ simply lined themselves up on a target, the tortoises displayed unusual and unexpected forms of complex behaviour.
Sep 27 1956?. [WGW response to letter.]
“….You are quite correct in your interpretation of the mechanical lay-out. I am afraid it is not as effective to drive from the rear wheels since this does not provide scanning through 360° together with movement towards the source of light when the scanning stops. You will realise what I mean if you consider the situation when the creature is moving forward and the only available light is directly astern. If the drive is on the rear wheels only then as the scanning proceeds, the front wheel will get into position when it is at right angles to the direction of travel so that no movement is possible and will then rotate further until the model is moving say hard aport with the photocell looking backwards. If it then catches sight of the light, it will continue to move away from the source in a circle and will not tend to pull itself in on the beam. With the arrangement as described however, signals will be picked up from any bearing and the model will eventually always pull in and approach the source of moderating light.
1956 [WGW response to letter from Australia.]
…”Thank you so much for sending me your letter [in archive] and the sketch of your little automaton. As far as I can gather, your ideas are quite independent of mine in detail but seem essentially convergent.
Our models also scan 360° and a light signal turns off the scanning motor just as in yours; the photocell and front wheel being on the same spindle. I do not however, turn the other wheels so that the model has an interesting cycloidal gait.
There is a fairly full description of the general scheme in my book “The Living Brian” published by Duckworths in 1953, Appendix 2, but not a detailed photograph.
I think our drive system is simpler than yours since the motor turns with the whole steering gear and photo-cell but as I say, the principle seems the same and it would be rather interesting to discover whether this may be in fact the simplest method of making a freely moving self-governing target-seeking device.
Our toys are a little bit more complicated in another sense; the amplifier has two stages and the effect of bright light which is sufficient to operate a relay in the first stage and shows that the model will diverge from a really brilliant source. The avoidance of obstacles is also achieved by connecting the output pack to the input of the amplifier so that it multivibrates slowly.”
Scanning
From Biographical Sketch: W Grey Walter, Walter J Freeman, Encyclopedia of Cognitive Science (2003)
An autonomous robot embodies the principles of goal-seeking and scanning that characterize animal behaviour. Grey Walter used his wartime exposure to radio detection and ranging (RADAR) to build a simple 'brain' that endowed his artificial 'turtle' with complex adaptive behaviors.
Biomedical Engineering
In the decade before the war Grey Walter had already done important work in a field we now call biomedical engineering by his discoveries in electroencephalography (EEG), a medical procedure in which the oscillating fields of electric potential on the scalp and in the brain are measured and interpreted. His first achievement was to identify correctly the source of the alpha rhythm (8-12Hz).
During World War II Grey Walter was involved in radio detection and ranging (RADAR). This experience with electronics enabled him to build equipment for EEG research at the Burden Neurological Institute laboratory in Bristol.. One of their achievements was automated spectral analysis of EEG traces. Walter used his skills in analog electronics to conceive a device built by engineers that displayed the frequency content in an EEG trace, Walter extended his temporal spectral analysis of time series to spatial analysis by conceiving a bank of amplifiers connected to an array of 22 oscilloscopes. This advance enabled him to show not only the amplitude but the phase difference of each trace of the alpha with respect to the others, by using cinemas of the oscilloscopes. With his 'toposcope' he visualized the spread of alpha waves across the surface of the brain. Walter proposed that the alpha represented 'scanning' by the brain in search of local centres of activity when none was present, and that it stopped when a 'target' was found in the cortex.
Autonomous, adaptive robots
Walter's greatest achievement stemmed from his wartime experience with electronics (Figure 1). Guided missiles with proximity fuzes then were one of two very active foci of interest, the other being devices for scanning the horizon for targets to be identified and intercepted. The scanning mechanism he helped develop was known as the 'plan position indicator', consisting of the point of light created by an electron beam that moved from the center to the edge of the oscilloscope screen and created a bar like the spoke of a wheel. The spoke rotated counterclockwise at the refresh rate of the screen. A likely radar target appeared as a bright spot, giving its direction and distance. This device is in widespread use today, for example, in ships, submarines, and air traffic control centers. It was the basis for Walter's toposcope when applied to alpha waves.
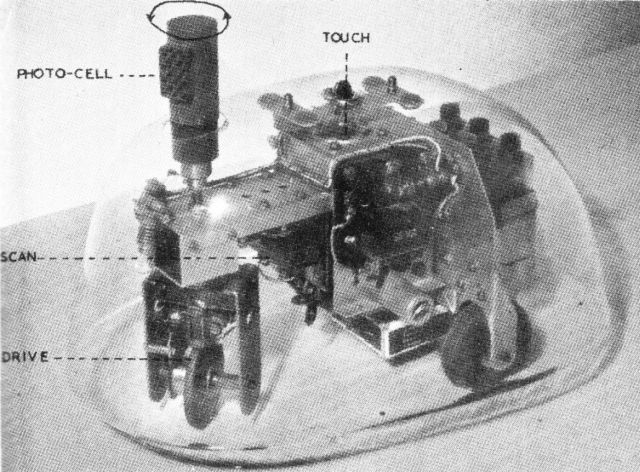
The concept of a machine that would define a goal and seek it by scanning resonated with his interest in brains as biological systems that evolved through learning from the consequences of their own goal-oriented actions. He undertook to incorporate these two cognitive operations, goal-seeking and scanning, into an electronic 'toy' that would simulate these most basic characteristics of animal (and human) behaviour. The outcome was fully spectacular, though at the time its significance was not recognized, and his device has been all but forgotten. It was a roving machine so life-like, as he described it in his book, "The Living Brain", that an old lady who felt pursued by it ran upstairs and locked her door. He named his device Machina speculatrix in order to distinguish it from passive devices, such as his earlier conception of M. sopora that incorporated Norbert Wiener's principle of stabilization of machine performance by negative feedback ("Cybernetics"), and from W. Ross Ashby's 'Homeostat' that extended the principle of the stability of biological organisms by introducing adaptation through learning. These stable models used what the Harvard physiologist Walter Cannon called "homeostasis", but unlike plants and sessile automata, M. speculatrix was continually on the prowl in search of its designer-endowed goal: moderate illumination. His threewheeled vehicle, which came to be known as "Grey Walter's turtle", had two motors, one for progression by the front wheel dragging trailing the hind wheels like a child's tricycle and one for turning the front wheel. Its drive system, batteries and 'brain' were mounted on a chassis. Above it he hung a carapace (shell) from a centre pole, so that it could swing inwardly from any direction and contact the chassis. This contact operated a switch, so that if the tortoise hit an obstacle or encountered an incline, it would stop, back up, turn, and eventually move around it or avoid it altogether. This 'receptor' gave the device the sense of touch, information about the direction of gravity, and the means to explore objects in its environment by touch. In a single charge cycle it could explore nearly 100 square meters, dealing with obstacles by pushing them aside or going around them, though sometimes straying too far and being found "starved to death" behind a couch. When it regained its hutch it turned itself off and took nourishment from electrical contacts on the floor. As a means for detecting the internal state, Walter fixed a marker light on the carapace that stayed on when the turning motor was on but went out when turning stopped. When the tortoise encountered its own light in a mirror, it stopped and oriented to its own light, but stopping turned out its light . Then it resumed circling, saw its light again, and stopped. This behaviour continued until it had passed the mirror. If it encountered another of its own kind, attracted by the other light, a stately dance ensued of bumping and backing. Walter thought that these behaviours expressed self recognition and recognition of conspecifics. These complex and not fully predictable behaviours of exploration, negative and positive tropism, discrimination, adaptation to changing internal and external environments, optimization, and stabilisation of the internal medium were done with a very simple brain: two miniature valves serving as 'neurons', two mechanical relays, two capacitors, two receptors, and two motors.
Evaluation and Summary
They were the first free-ranging, autonomous robots capable of exploring their limited worlds. The essence of an intelligent machine is that it has within its brain a capacity to conceive desired future states, and it has the degrees of freedom needed to create and adapt its actions in pursuit of those goals in the unpredictable circumstances of the immediate and remote environments. These flexible brain functions that enable simple systems to function in infinitely complex environments are not achieved by rule-driven symbol manipulation, which is at the heart of cognitive science and conventional artificial intelligence. Moreover, Walter emphasized analogue electronics to simulate neurodynamics at a time when most of his colleagues such as John von Neumann were developing digital computers to implement symbolic logic and deep arithmetic algorithms. His devices were the forerunners of currently emerging machines that are governed by nonlinear dynamics, and that rely on controlled instability, noise, and chaos to achieve continually updated adaptation to everchanging and unpredictable worlds. He can well be said to have been the Godfather of truly intelligent machines.
". . . the driving wheel is fixed at whatever angle it was when the light was seen, and the scanning of the horizon by the eye also stops of course. At the same time. . . the driving motor is turned up to full speed. The model stops looking slowly round and hurries toward the light. However, unless the light was seen when the eye happened to be facing straight ahead, the angle at which the steering came to rest at the moment of sighting will deflect the model gradually away from the light. When the deflection is so great that the activation level of the photo-cell falls below threshold, the Relay 2 opens again, the scanner starts up, the drive is reduced to half speed and the model is re-positioned, this time so that the light is more directly ahead. This process of progressive orientation is an important part of the behaviour mechanism. It is cumulative-every time the model steers itself slightly off-beam the momentary operation of the steering-scanning mechanism brings it back more nearly on course and it ends up with a heading on-beam. The process often looks clumsy, because the eye seems to veer away from the light and then the scanner has to make nearly a whole rotation to bring it back, but inevitably with each such operation the model gets itself into a better position to bear down directly on its goal. The aiming-error is steadily reduced as the goal is approached. " Walter (1960)
Better than Scanning – Random
On several occasions WGW mentions an improvement of the rotary scanning approach. In a response to Ivan Sutherland’s letter dated 7th Jan 1960, WGW says
“ As an extension of this principle [rotary scanning] it is interesting to consider what would be the consequence of producing a purely random rather than rotary scanning so that the angle and therefore the heading of the creature were a purely random function all the time. Observation of certain animals suggest that their movements might be considered as a random vectorial addition and this suggestion might be more realistic in comparison with real creatures than in the rather monotonous rotary scanning of M. speculatrix.”
As it turned out, scanning as method for both drive and steering proved difficult to construct by others that were inspired by Grey Walter's tortoises. As I've added new blogs to the rest of the cybernetic zoo , this feature has become apparent. There is an article written by Ivan Sutherland solely about steering ["Stability in Steering Control", Electrical Engineering April 1960]. I have reproduced this article here.
Scanning Analysed
Before visiting the Bristol Robot Labs in 2009, I was in dialogue with Ian Horsfield who provided some footage of one of their replica tortoises in motion.
I picked some points to plot, the centre of the photo electric cell, and a point just forward of the rear wheels in an attempt to reproduce the original trace photos of Elmer and Elsie. The original Elsie scanned in a counter-clockwise direction, and Elmer in a clockwise direction. The geometry of the trailing wheels is such that when scanning in the counter-clockwise direction, the tortoise creeps to the right. It cannot scan and remain stationary. The two replicas both scan in the counter-clockwise direction.
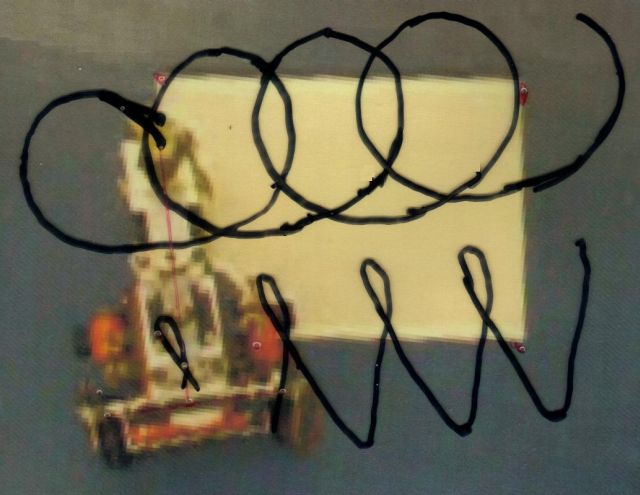
A similar time-lapse pattern as seen in the original ELMER/ELSIE photos.
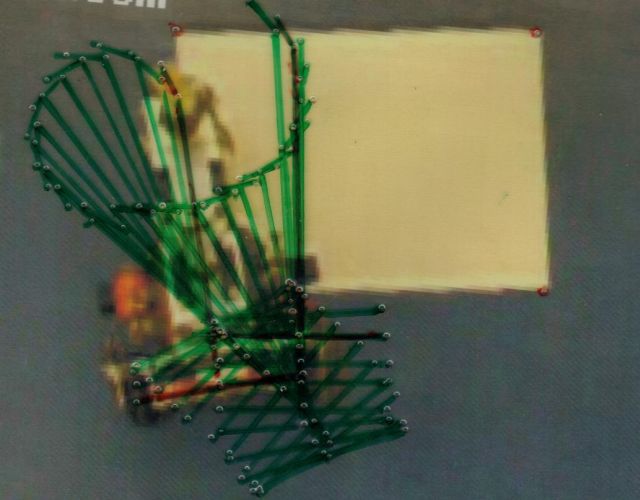
A manual plot of some points during a scanning cycle showing the rear wheels according to the direction of the scanning (rotating) photo-electric cell.
Kenneth Craik had a formative influence in modern experimental psychology and was one of the first to explore principles common to brains and machines.

Craik was only thirty-one (in 1945) when he was tragically knocked off his bicycle, by someone carelessly opening a car door, and run over.
TRIVIA:
In the reference discussions on child dev , when asked about the name of Grey Walter's personal tortoise, he responded:
"This one is called Olga, the beautiful spy. This spying machine was made for this type of demonstration with a transparent and rather glamorous coat, and a well-proportioned body!"
On several occasions Grey uses the term 'spying' instead of 'scanning'.
The only reference I can find to a spy called Olga c1940's is Olga Chekhova: alleged Hitler's Favorite Actress and a Russian Spy.