Extract from 1980's article:
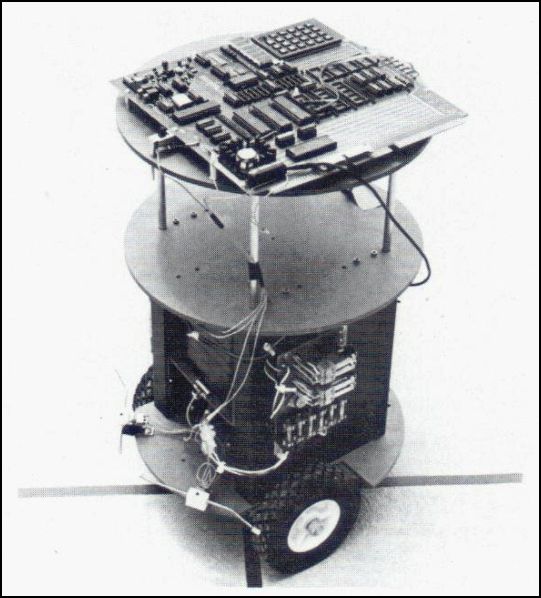
The articles present experiences in interfacing and programming a SUPERKIM single board computer for the control of a Lour Control ET-2 robot shell. The ET-2 (Experimental Transmobile with 2 drive motors) consist of a three level frame powered by two separately driven wheels and balanced by a free caster.
Part 2 adds the sensors to give it true 'feedback'.
The SUPERKIM controlled ET-2 robot is an excellent, moderately priced system to which the robotics experimenter can easily add more sensors and other equipment.
The contact sensors … can be used to demonstrate obstacle avoidance behaviour in a suitably prepared environment.


SO AWESOME!! In a momentary brain fart I thought about building this kit when I was a kid, so I Google’d it and landed here. I petitioned my parents unsuccessfully every day for six months, then the science fair rolled around! It took some time for it to arrive. I suspect the ‘company’ was a guy working out of his garage. I had it up and running in under a week. For the science fair I controlled it with an Apple 2 using the ‘annunciator’ pins in the joystick port. Needless to say the motors and relays created enough EMI to drive the computer insane, necessitating a regular reboot. I got a B-. To this day I don’t think my teachers believed I built it myself. Thanks for scanning and posting those pages!!
Hi Reuben,
I designed, built and sold the Superkim.
http://www.rotaryeng.net/who.html
http://www.rotaryeng.net/RT1.pdf
http://www.rotaryeng.net/IEEE-road-test-sys.pdf
http://www.rotaryeng.net/skid-pad-C&D.pdf
I have a bunch of parts and bare PC boards left over.
Paul Lamar
—
The Rotary Engine NewsLetter. Powered by Linux.
ACRE NL web site. http://www.rotaryeng.net
Youtube key word PaulLamar2
Copyright 1998-2011 All world wide rights reserved.