"HILARE"
An acronym of "Heuristiques Intégrées aux Logiciels et aux Automatisms dans un Robot Évolutif".
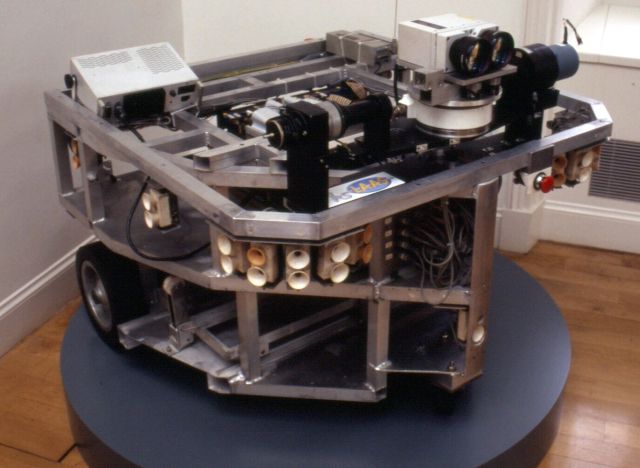
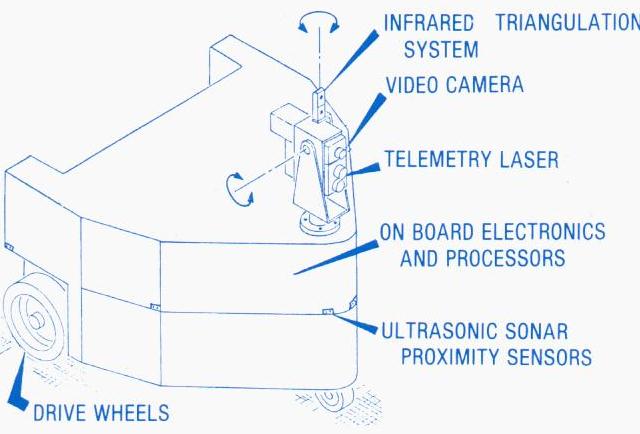
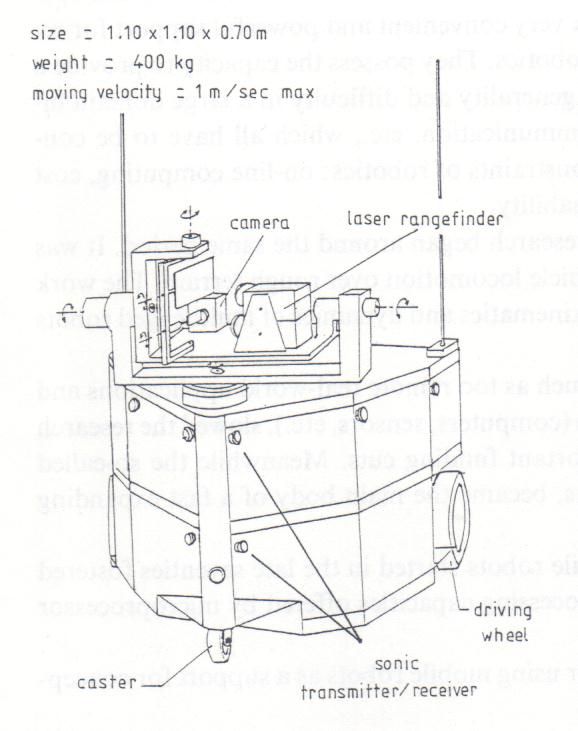
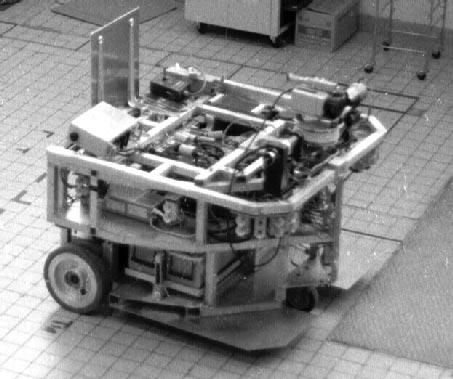
Designed in 1977 at the Laboratoire d'Automatique et d'Analyse des Systèmes du C.N.R.S Toulouse, (LAAS), it is the first French autonomous mobile robot equipped with ultrasound sensors and laser telemetry.
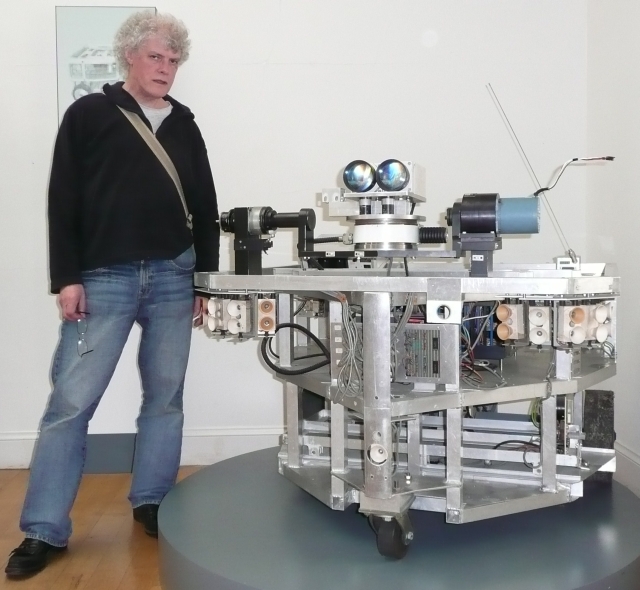
My friend David Buckley with HILARE, to give a comparison of size. [June 2009]
Now in the Musée des Arts Et Métiers, Paris. [June 2009]
See Robotics Age Spring 1980 pdf here 
See Robot Research pdf here 
.jpg)

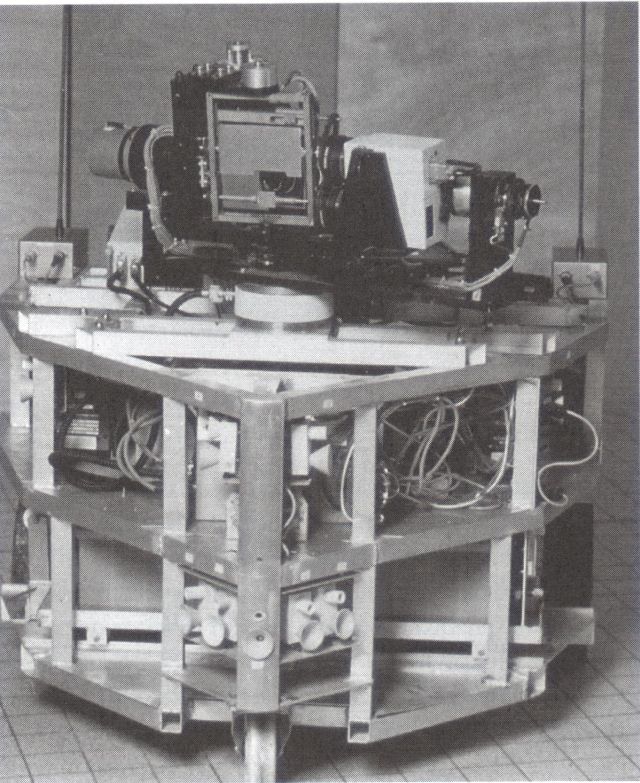
HILARE II built in 1990. HILARE-III (not pictured) was built in 1999.