Interface Age article pdf here

BOOK REVIEW from early KIM magazine
TITLE: How to build a computer controlled robot
AUTHOR: Tod Loofbourrow
PUBLISHER: Hayden Book Co. #5681-8 $7.95If youre looking for a book which presents a nuts and bolts approach to robot construction–you'll want to look at this book! The author starts virtually at ground zero and presents a very detailed plan (including parts sources) to enable just about anyone who's handy with tools to construct "Mike", a three-wheeled robot. "Mike" was featured in INTERFACE AGE magazine (April 1977) and is controlled by (you guessed it!) a KIM-1!!!
The book contains plenty of drawings, program flowcharts, and software listings to enable one to duplicate Loofbourrow's efforts or to venture off to their own horizons. (The flowcharts will be a great help to our non 6502 friends)
"Mikes" construction is broken down into three stages. The first stage gets your new "friend" to the point where he can be controlled by a joystick and has no control over itself. Stage two enables your friend start thinking for itself and exploring its new world on its own by means of its new ultrasonic sensors. In the third stage, your creation gains the ability for limited voice recognition. There are so many ways to expand on "Mike" that all of them just can't be covered in one book. But after your robot is up to stage three, I'm sure you'll have plenty of ideas of your own. This book presents a really practical approach to entry into the field of robotics.
ERIC
.jpg)
chapter one – extract from book
introduction to "mike"
The question most commonly asked about robotics is, "Why build a robot?" If the idea of having a robot to act as your companion, entertainer, or slave does not intrigue you, perhaps one of the following reasons will. One reason for building a robot is that it is an exciting way to learn about electronics and microcomputers. You can also learn the actual limits of our present technology and perhaps make improvements in it. Other reasons are the fun of building a robot and the excitement of watching your creation "come to life." However, the most important factor comes from an inner curiosity about nonhuman forms of intelligence. Motivation to create this intelligence is the driving force behind most roboticists.
Robots can be thought of as representing a step in evolution. As an evolved, he became more and more intelligent. Now man is atmpting to create intelligence in the form of robots. Robots are almost extension of man's intelligence.
As you proceed with Mike's construction, he evolves in his own way in a sense. He is built in three stages. In Stage I, he is operated by means of a joystick, and he is totally under your control. Unfortunately, If you should happen to drive him into a barrier, he has no provision for resisting your command. In Stage II, Mike becomes independent. He can "see" and "feel" his environment and can react accordingly. In Stage III, Mike gains the ability to hear and respond to whistles and certain voice commands. Stage III also contains various ideas, as yet not implemented, for Mike's further development.
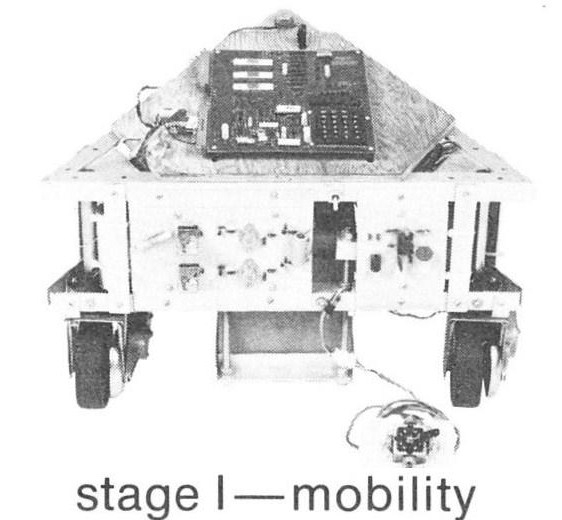
stage I—mobility
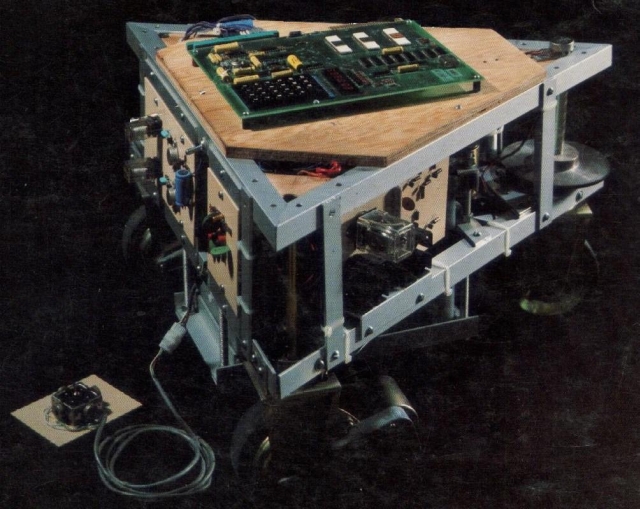
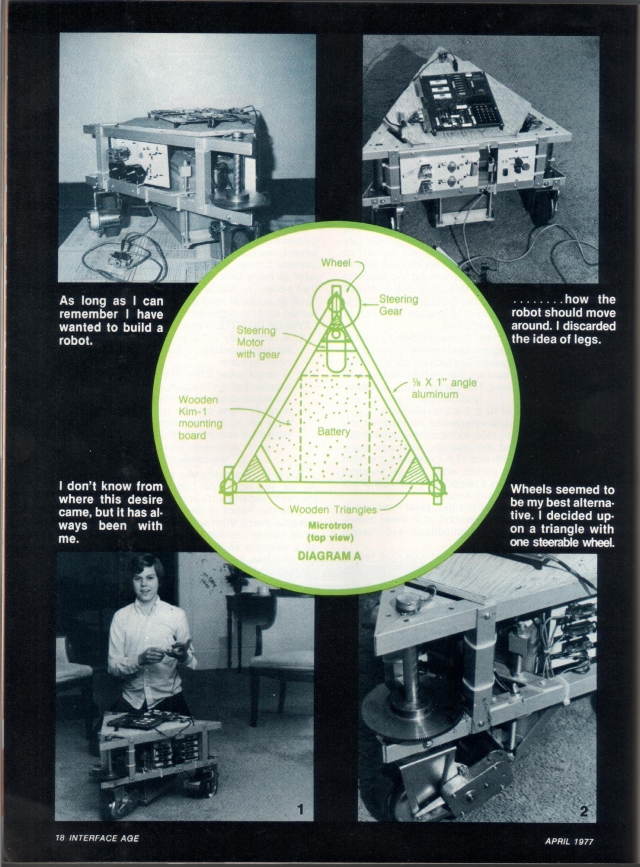
In the first stage, the mechanics of Mike are constructed. His basic triangular framework is constructed of angle aluminum. It houses his power supply, which is a 12 V car battery. His mobility is provided by three motorized wheels. Mike is controlled with a joystick that is connected to him by a thin cable. You can make him move at five speeds forward and five speeds reverse, his top speed being about walking speed. He can also be made to turn at angles from 0° to 60° in either direction by rotating his front wheel with a motor.
At this stage, Mike is about 14 in. high and is shaped somewhat like a spearhead. Each side of his triangular frame is 23 in. long. On top of the frame rests Mike's brain, a Kim- 1 microcomputer ("micro" for short).* The Kim directs Mike's operation and allows him to execute your commands. The joystick sends out two voltages to an analog-todigital (A/D) circuit. The A/D circuit converts these voltages to digital values, which are stored in the microcomputer. Through these values, the Kim can determine the turning angle of the front wheel and the speed at which Mike is moving and compare these with your commands. If your commands differ from the actual position of the front wheel or from the speed of the motorized wheels, the position or speed is changed until it meets your command.
I have found that with Mike's three wheels he is powerful enough to push or pull 150 lb or carry over 600 lb with ease. You can test him over a variety of terrains to determine the limits of his capabilities. His three main circuits—the power supply circuit, the speed control circuit, and the directional control circuit —are mounted on the sides of the triangular frame. The Kim- 1 rests on a sheet of 1/2-in. plywood, which is bolted to the top of the aluminum frame. The Kim is connected to three circuits —the power supply circuit, the A/D circuit, and the inverter circuit. The power supply circuit supplies the Kim as well as the logic circuitry with power. The A/D circuit allows the micro to compare commands from the joystick with the actual position of the front wheel. The inverter circuit changes the output of the micro from logic 1 to logic 4. This circuit leads to the speed control and the directional control circuits, which in turn lead to the motorized wheels and directional control motor, respectively. During most of Stage I, Mike remains totally under your control. The only actions of which he is capable are those dictated by the joystick. At the end of the Stage I section of this book, there is a program that provides Mike with a certain amount of independence prior to the second of development. This program is called the self-direction program. The self-direction program causes Mike to move in a predetermined pattern. The pattern can be changed by changing the values in two tables that are stored in the computer. I have included a program for a pattern that forms an asterisk and one that forms a cloverleaf pattern. It should not be hard for you to write programs for your own patterns once you understand the basic concepts of the self-direction program.
At the completion of Stage I, Mike will have become a robot more on the order of a machine than a cyborg (humanoid robot).
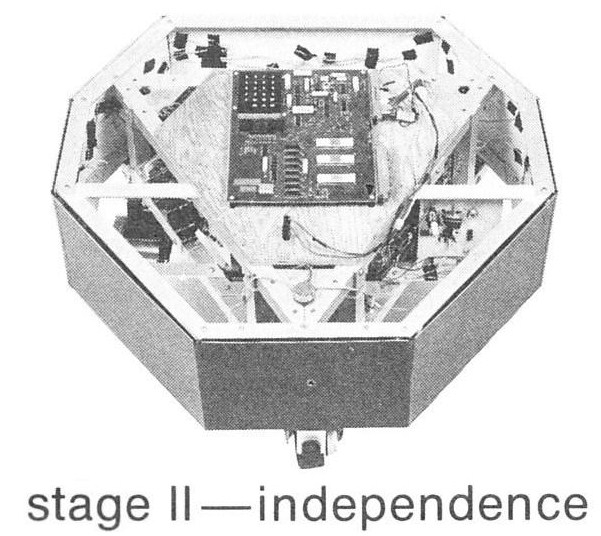
Stage II—independence
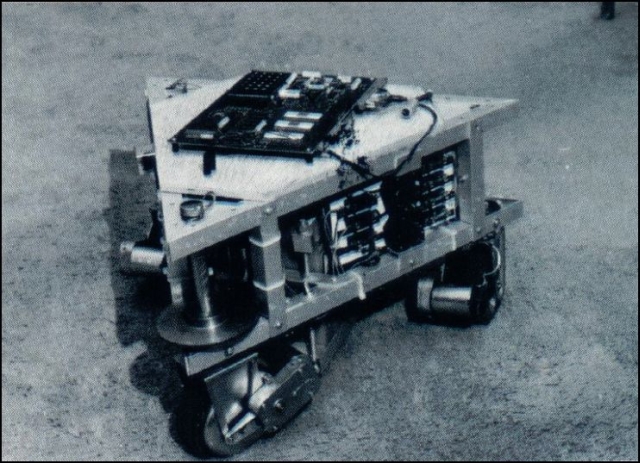
In the second stage of construction, Mike becomes independent. Now a true robot, he makes his way about an area totally independent of a controller. Mike looks different from the way he did in Stage I. Around his original triangular framework is an eight-sided frame. Although Mike is still 14 in. high, he has expanded to 27 in. in width and has begun to look like the base of a full-sized robot.
In Stage II, Mike is equipped with ultrasonic "sight." His "eye" is a small, ultrasonic transducer which sends out every quarter of a second a wave of sound inaudible to the human ear. By noting the length of time required for the sound wave to be reflected back to the transducer, Mike can determine the distance of an object in his path. When something blocks his path, he "sees" it with his ultrasonic sensor. He backs up, turns to the right, and proceeds on his way, avoiding the obstacle. The range of the ultrasonics can be varied from 1 in. to more than 10 ft by changing one number in the computer.
If Mike's ultrasonics don't see an object in his path (perhaps because it is too far to one side), contact with the object is made by the main sensory system—the impact sensors. The impact sensors feel that an object is contacting them, and Mike moves away from the object. The impact sensors absorb much of the impact of contacting an object. Therefore, Mike touches objects so lightly that you can actually let him bump into you. Each one of Mike's eight impact sensors contains five ribbon switches sandwiched between two sheets of aluminum. Each sensor is attached to one side of Mike's eight-sided frame.
The reaction that Mike has when one of his impact sensors is hit depends on which sensor receives the impact. For example, if the front impact sensor is contacted, Mike quickly backs away from the object he touched. Then he turns right and proceeds forward. Contact with a side sensor causes him to back up and turn away from the side that was hit. Mike's movements in reaction to each sensor impact are determined by a table of values stored in Mike's "brain." This table can be changed easily to give Mike sensor responses as complex as you wish. The impact sensor responses I include for Mike enable him to seek out and pass through doorways. The system allows Mike to find his way into, around, and out of a room.
On occasion, a low-level object such as a curb may not come into contact with the impact sensors or be in the range of the ultrasonic sensors. In that case, Mike touches the object lightly with a soft rubber feeler. This contact triggers a switch that makes Mike react as he does to an impact sensor hit. The feelers ride about 2 in. above the ground and will detect nearly any obstacle Mike may encounter. Each feeler contains an SPDT-center-off-momentary-contact toggle switch. Two feelers are located near Mike's front, and two are located in back.
At the end of Stage II Mike is an independent robot. Of course, you can take control of him at any time by plugging in the joystick and loading the joystick control program. It is fascinating to watch Mike move around, "seeing" objects before he comes near them and following the behavior patterns that you have programmed.
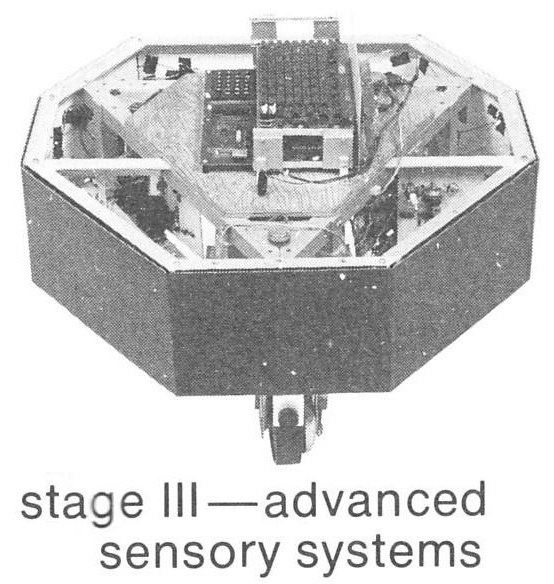
Stage III-advanced sensory systems
In Stage III, Mike is enabled to recognize and respond to whistles at certain frequencies and to voice commands. This stage is presently being worked on by the author. At all times, Mike is listening. He is comparing any sounds that come into his "ear," (a microphone) with word templates that are stored in the computer. When the sounds match one of the templates to a reasonable degree, Mike determines that he has heard one of the words he knows. Immediately, Mike executes the action or actions specified by the word. For example, if Mike recognizes a "left" command, he turns left. As the voice circuit and program have been tested and improved, Mike has progressed from whistles to words. Whistling at a constant frequency is relatively easy for Mike to discern. Spoken words are much more difficult. A large amount of testing and modification has been necessary in order for Mike to recognize spoken words.
As I have already said, words are matched by comparing them with templates. You form these templates through a special program called the template control program. You can place any reasonably short words or sounds in the templates. The templates are stored in the computer to wait for a matching word or sound to be said. The nature of voice recognition is such that only your commands will be heeded. No one else's voice will match your templates.
The last half of Stage III is devoted to the future plans I have for my Mike. One such idea is for using an image sensor camera. An image sensor camera produces a black and white picture. It could be used by Mike actually to "see" his environment. Through the use of this camera, Mike could also be able to pick out certain objects that he recognizes in his surroundings.
Another system that I plan to add to my Mike is a voice. Mike would be able to respond verbally to voice commands or to talk if it were appropriate. In addition, I am going to build an upper body on Mike's eight-sided frame. I have not yet determined the exact shape that I want his body to assume, although I believe that his height will be about 5 ft.
I am planning to add one or two arms to Mike so that he can manipulate as well as explore his environment. The claws on the arm(s) will contain a type of force sensor so that Mike can apply the ideal amount of pressure to pick up various objects.
Two final additions that I would like to make to Mike are a video terminal and a keyboard. The video terminal and keyboard would be used for testing the image sensor camera and for loading in software. I expect that they will also enable me to create a control language for Mike, with instructions that apply directly to Mike's operation.* The terms Kim-1, Kim, Micro, Microprocessor, Microcomputer, Computer, Processor, and Mike's brain will be used interchangeably throughout this book.
Article from Inc. Magazine – Oct 15, 1996
Are You Raising an Inc. 500 CEO?
Stories of what some this year's Inc. 500 CEOs did as children that suggested they were really entrepreneurs as kids. By Christopher CaggianoYour son's new best friend has sparks flying out of him. It would have been natural for Tod Loofbourrow's parents to worry about whether their 12-year-old was hanging out with the wrong bunch. As it turned out, his good pal Mike smoked–but only, presumably, as the result of a malfunction. Loofbourrow, who would later launch Foundation Technologies (#340), built the six-foot, 70-pound hexagonal playmate in his folks' basement. Mike–short for "Microtron," the robot's full name–ran on a car battery and understood 10 oral commands. It also occasionally acted on its own impulses: at one computer conference, the creature began racing manically into the audience. At a later such get-together, Loofbourrow himself was stormed by an eager editor from Hayden Books, who signed him to pen How to Build a Computer-Controlled Robot. "I wrote it on yellow pads, and my mom typed it," he recalls. Royalties from the book, which sold 20,000 copies, enabled him to start the business.
I have read your esteemed book How to build a computer controlled robot in 1982. this book i would say very very informative and educational. I couldn’t make it my self that time. i would like to see a video of this robot if possible you upload it in utube so other people who are interested can see it also
Thanks