ENTROPY— BUILDING A ROBOT FROM SCRATCH
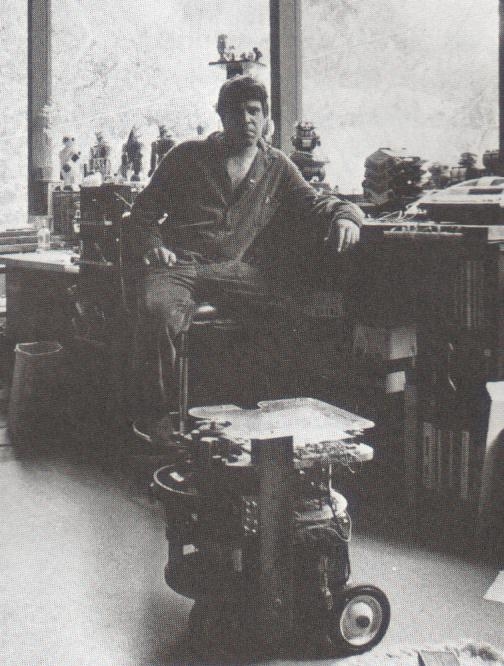
Gene Oldfield, began building his first major homebrew robot around 1976. Entropy, as it was called, was a mobile, three-wheeled robot powered by a car battery. A KIM single-board computer was interfaced to the sensors and relays by only seven microchips, which means that most of the processing was done in the computer itself. To give you some idea of the process a homebrewer goes through, we have outlined the steps in Entropy's development:
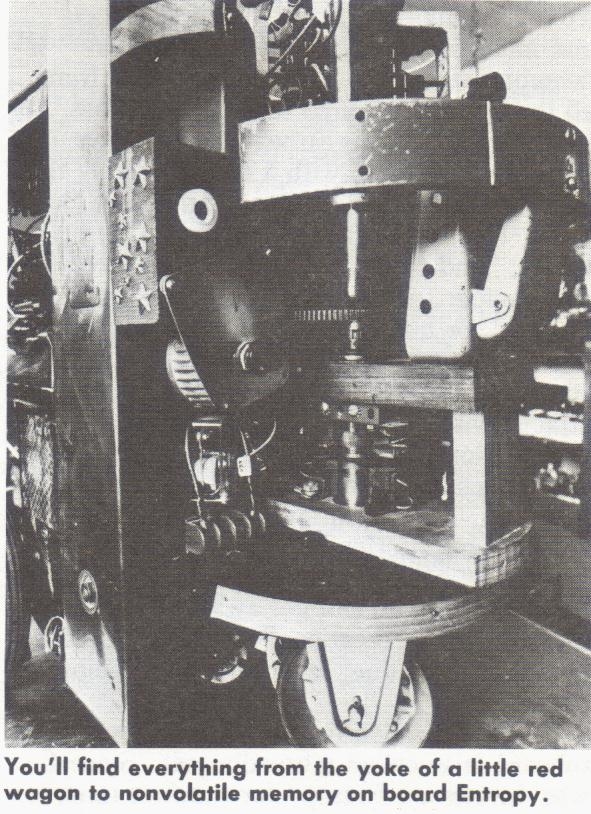
"I began," says Gene, "with the mechanical construction. Entropy's back wheels were on a common axle, which means that the turning center must lie somewhere on the extended axle. Rather than build one from scratch, I used the axle yoke and wheels from a discarded toy red wagon." The front wheel was motorized and attached by a vertical axle (called the scan). The electrical connections to the motorized wheel were commutated using generator brushes
from a car motor. "Had I wired the wheel and motor instead, the wires would have become twisted and eventually broken from all the turning required to steer the robot." A second motor with gearhead drove a gear on the scan axle along with a cam assembly that allowed the robot to be set in any direction.
"I made the frame of wood," Gene continues, "and painted, waxed, and covered it with copper foil." While not a traditional material for building robots, wood has advantages. It's an electrical insulator; light, strong, easily worked; and it's very simple to attach switches, wires, and terminal blocks as you go along. Also, wood is not as high tech and makes the robot acceptable, more like furniture. The visual impact is an an important design criterion. A robot should be friendly, fun, and nonthreatening. "As a homebrewer, you can get away with a lot and still make your creations legitimate. R2D2's popularity was due, in large part, to being cute."
Gene decided to wire Entropy on a protoboard (also called a breadboard). 'Since I was developing Entropy for the first time," he explains, "I did not know how it was go ing to be wired." The protoboard permits endless experimentation. Once power wires were in place, it took about four hours to connect Entropy's relays using patch cords (wires). "This is both fun and satisfying—you feel that you could emulate anyone's robot by simply changing a few wires." At that point, Entropy was in the same category as the mechanical/electrical rats and turtles of the fifties. It could center its scan axle and stop.
Next, Gene wired the motors, sensors, and relays to the electronic components that interfaced with the on-board computer. Again, because the pattern of connection was not established, he used a protoboard.
Entropy was to operate without external wires, hook-ups, or data links. Data from sensors was processed on board. While doing the dishes and other seemingly simple tasks were impossible, Entropy did have the sensors and memory to be effectively mobile. It could travel from room to room and navigate through doorways. Sonar, using a tone- decoder chip, measured multiple reflections on distances ranging from one inch up to fifteen feet.
The KIM computer on board allowed Entropy to be programmed for motion at over 100 instructions per minute. Operations were performed through the record/playback program, much the way you save, load, and run programs on your computer. In the playback mode, the computer sends out commands, which the robot acts upon.
Since Entropy lacked a tape recorder or disk drive, Gene used nonvolatile RAM. With a special CMOS RAM chip (which requires very little electricity) and a couple of nicad batteries, he could keep the RAM powered up even when the rest of the system was turned off. The system is both cheap and reliable. Programs are always present. Simply turn on the robot, select a program's starting address in memory, and press go.
Entropy was a successful project. The robot wandered around the house, moving from room to room.
Above extract from the book "Everyone Can Build a Robot Book " by Gene Oldfield and Kendra Bonnet, 1984.
Entropy is on the right.
Source: Infoworld, 8 Nov 192.
Gene Oldfield had the original Robot Repair in Sacramento in the early 1970's. He's more into Art robots and electric bikes these days, with the Horse Cow Art Collective. See Youtube video below.