elektor june 75
beetle
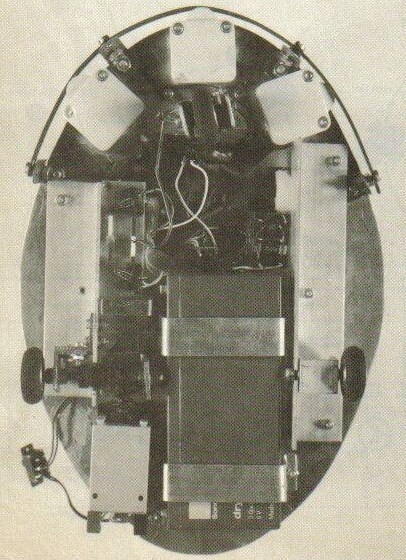
Beetles, tortoises and the like have often served as models for cybernetic machines which must also have a reasonable appearance. The beetle described in this article can 'see, hear and feel' and reacts to information in the form of sounds and movements. The animal has a memory and can get tired. The beetle is the first of a series of articles on cybernetic models.The behaviour of the beetle: action and reaction
In daylight (vertical light) the model moves slowly forward in a circle (counter-clockwise) with a diameter of approx. 80cm. If during its journey the beetle arrives in a place where there is less light (for instance in a dark corner or below aq chair), it rests in the shade for approx. half a minute to a full minute and then resumes its circulatory journey.
It is also possible that, instead of continuing the model decides to take a prolonged rest in the shade: it 'falls asleep'. This condition of prolonged rest can only be altered by external stimuli. The object casting the shadow is removed or the model is wakened by a loud sound (clapping). If the beetle 'sees' a horizontal light source on its journey, it makes a beeline for it. Any deviations from its course are automatically corrected.If the model hits an obstacle in its path, it gives a brief cry of fright and immediately shrinks back. This reverse movement is, however, preceded by a short turn, so that when the beetle resumes its forward movement after 3-4 seconds, it is positioned obliquely with respect to its previous direction of travel. Because the beetle can now no longer see the light source, it again starts a left turn, which results in a second collision with the obstacle, somewhat more to the left than the first time. Thus, after a few repititions, extensive obstacles are also dodged, after which the beetle heads for its goal (phototropism).
When the horizontal light source is reached, the model will collide with it and the above-mentioned swerving movements will follow. As a result, the model will find itself behind the light source. If this horizontal light source does not emit light backwards and there is also a shady area at the rear of the lamp, the model goes behind the lamp to enjoy a short or prolonged period of rest.
The model can also learn. If at the moment of collision a warning sound (clapping) is made, the model concludes that the collision (pain) and clapping belong together. For this reason, if a warning sound is made when the model is moving forwards, it will now first give a cry of fright and then perform the same swerving movement which would otherwise be performed in the case of an actual collision. [Rh 2010 – this is typically called a 'conditioned response'.]
The memory fades, however, during a rest in the shade. After such a pause the model hesitates briefly when the warning sound it made; it listens for a moment and immediately after the hand-clapping the forward movement is resumed.
In general, this simple cybernetic model behaves in a typically animal-like way. It can move. hear, see, feel, it reacts efficiently to certain external interferences, acts purposefully and has also certain reflexes in addition to the senses of touch and hearing.
Things become even more interesting if two models are available, each with a light source on its back. If moreover the cry of fright of one beetle is tuned to the warning sound of the other, an exchange of experience may take place. The innumerable possibilities of searching, pursuing and swerving guarantee an interesting course of experiments.
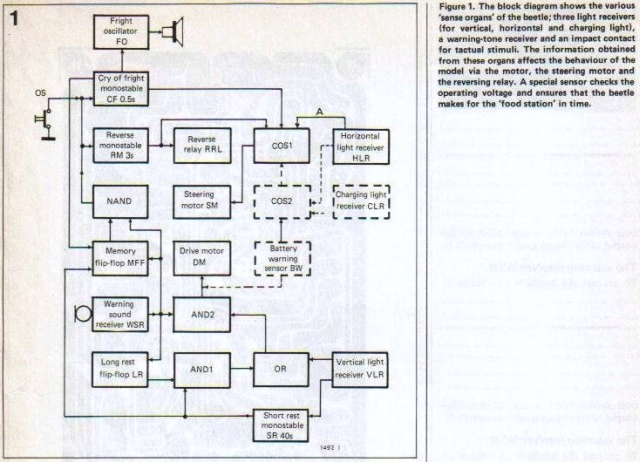
As is indicated by dashed lines in the block diagram (figure 1) a 'hunger' sensation can be added. This part immediately interrupts a journey or a period of rest when the battery voltage dropsw below a certain minimum. The model then heads for a second lamp placed near a charging unit. If on the way to the charging unit the beetle starts to use less current for some reason, it records that sufficient energy is still left to resume the normal search for the first lamp. For demonstration it is advisable to use a potentiometer as supply control; the beetle's hunger may then be artificially generated.
see full pdf here.