Wireless World, December 1972
Free Roving Machine by M.. F. Huber, B.Sc.
A device which will "explore" a room and by finding and tracing the path of a length of tape laid on the floor, return to a charger at intervals to recharge its batteries
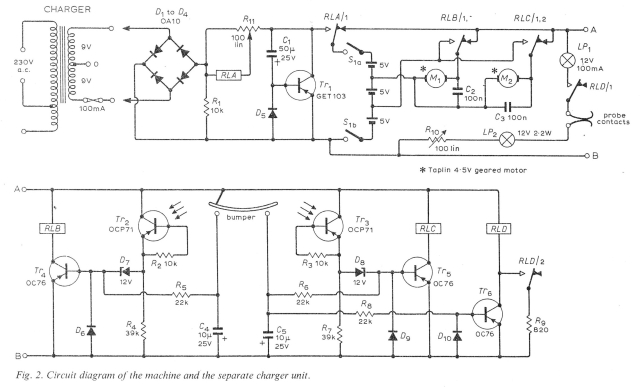
A number of years ago, Dr. Grey Walter first demonstrated that quite simple machines could mimic the goal-seeking ability of animals. The machine described here will avoid the obstacles in a room and return at intervals to a battery charging point. For safety reasons, the machine charges at a low voltage. The charger consists of a step-down transformer in an insulated box, with sockets in which the probes on the machine engage.
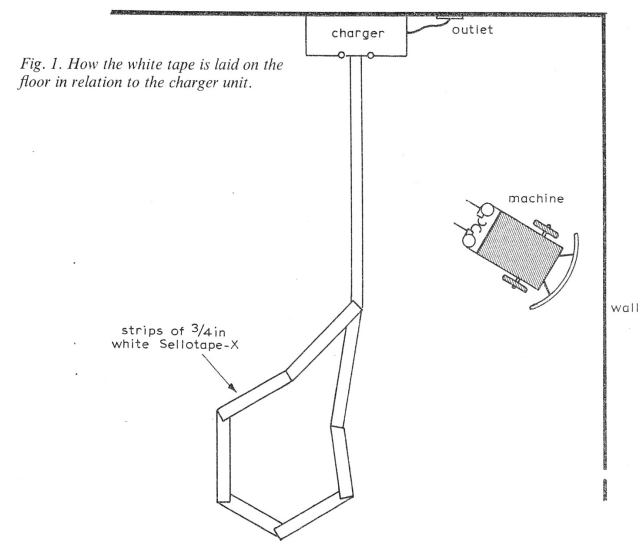
The charger is placed against a wall of the room, and a few feet of white tape are laid on the floor from a point midway between the socket holes towards the centre of the room, with the blind end formed into a small loop (Fig. 1).
The machine is driven by two motors, one for each of the rear wheels, so that steering can be obtained by reversing one of the motors. A third, castor wheel, is fitted to the front of the machine.
The front bumper is made from springy piano wire and has two associated contacts. In a head-on collision both contacts are made, but if the machine hits an object with a glancing blow only one contact is made.
The probes at the rear of the machine have to make contact with the charger unit. They are mounted on single turn springs of light piano wire and are arranged so that if one probe is depressed more than the other a contact is broken. The machine roams the room with the bumper at the front.
See2-page pdf here. Thanks to David Buckley who told me about this robot.