Pre-Vision version.
See earlier and later models
 1961 – APL-JHU "Ferdinand" Mod I
1961 – APL-JHU "Ferdinand" Mod I
 1962-5- APL-JHU Hopkins "Beast" Mod II with extended sonar & vision
1962-5- APL-JHU Hopkins "Beast" Mod II with extended sonar & vision
.jpg)
In below Video clip, see 1min 50secs in for 1min 40 seconds.
Update: July 2013 – JHU APL have released a video clip (see below) showing the new vision system.


.jpg)

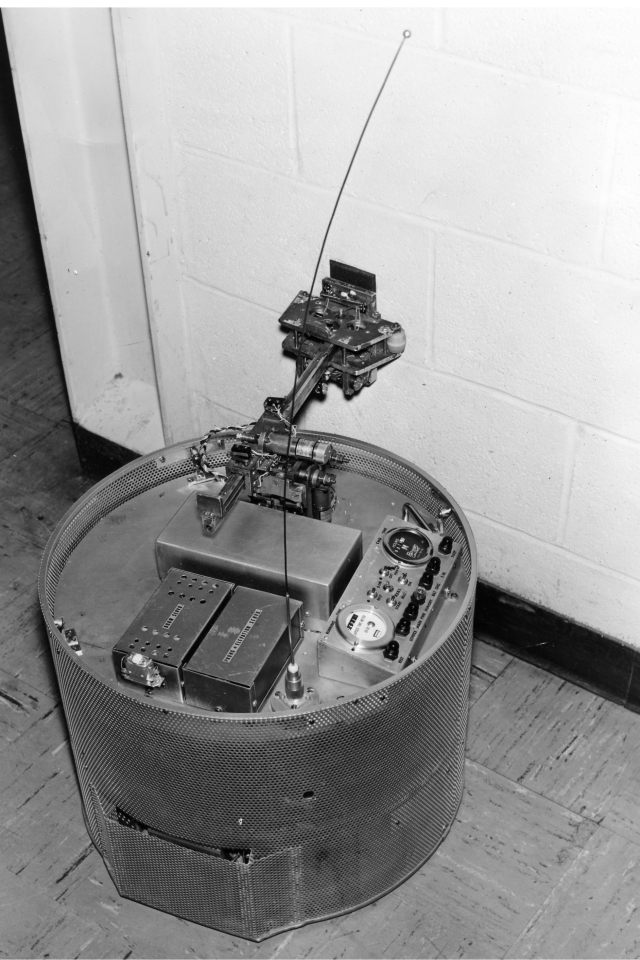
The holes in the mesh are for the early sonar sensors.
Below are a series of stills from the above video clip that shows Mod II negotiating a building stanchion. One segment is from the movie "Future Shock". It used to exist as a clip on its own right, but has been removed because of some reason or another. 



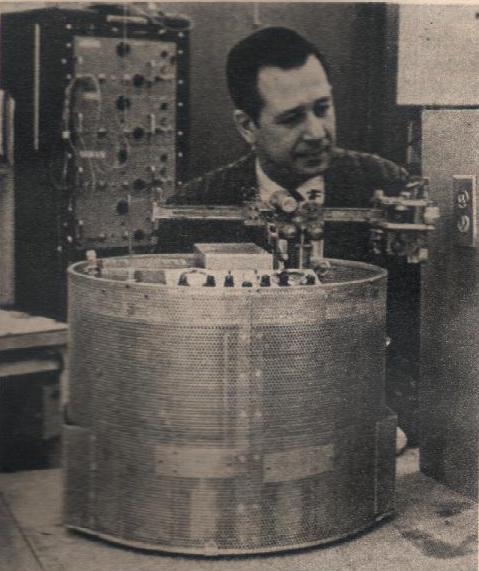
Image above from…
Mechanix Illustrated June 1964
A Visit With Mod II
We recently paid a call on the Applied Physics Lab of Johns Hopkins University, which is out in the gentle Maryland countryside between Baltimore and Washington. We had read about The Beast—an automaton designed to move about and survive on its own in the hallways and offices of the lab. A complex of sensors and circuitry and electric motors, we had read, The Beast was a creature of moods—playful now, frustrated and panicky at other times, always looking for an electric outlet to plug into for a recharge or a—a what? A Something, because when it had stored enough energy at an outlet it would take off down the hall again, skipping doorways, avoiding traps and not falling down the stairs. Nylon shoes underneath it, dropping over the edge of a top step, would send a signal and change The Beast's direction. By such devices The Beast moved about and survived in its environment.
The creature seemed worth seeing so we asked permission to watch it do its stuff, flying down on a recent Monday morning. When we got there The Beast was in the shop. It seems that during a survival test its developers do not, as we had fondly imagined, let it run on and on, observed or on its own, until failure brings the test to a halt. Late on Friday it had plugged into an outlet to recharge and at that point they had put it on a cart and taken it down by elevator to their shop to finish recharging and to spend the weekend in suspended animation. The test was to resume on Monday at the outlet from which they had removed it. This resumption was delayed until we got there.
The Beast really is known to its developers as Mod II, short for Applied Research Laboratory Johns Hopkins University Automaton Model II. It is part of the Lab's Adaptive Machines project and its purest purpose is to provide material for studying an adaptive machine-one into which the developers are attempting to build the ability to learn, on its own from its own experiences. It is common to tag such efforts with a "practical" purpose, too, and Mod II has one. Eventually techniques developed with Mod II may be used on unmanned space or ocean-floor vehicles—machines that will be able to cope with travel in strange environments with only occasional major decisions being signalled to them from earth or the surface of ocean.
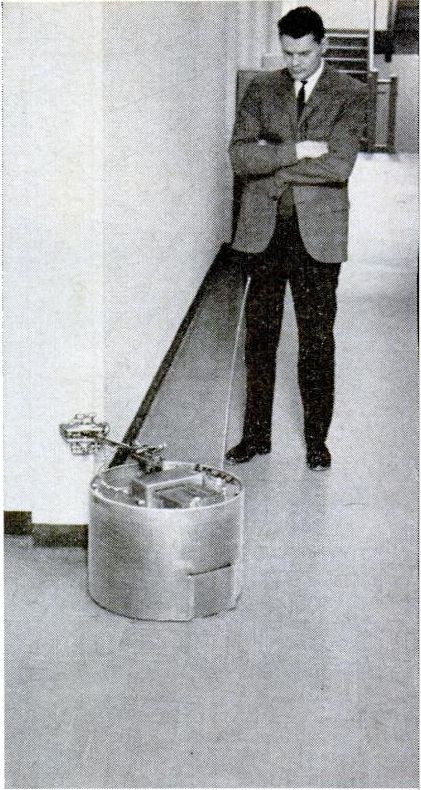
As you see in our picture, showing The Beast with Leonard Scheer, one of the electrical engineers working on it, the robot is a sort of rolling tower with a boom and probing head on top. When they set it back in place, with its head facing the outlet from which it had been removed on Friday, Mod II was switched on. Its motor and cooling blowers began to whine and the head began to feel the wall, crashing into it noisily; then the head contacted the wall firmly and the machine moved down the hall, the head rolling along the wall on its nylon rollers. Stanchions project from the walls of the Lab corridors at regular intervals; halting at each of these briefly, and then moving around them, Mod II made its way down the corridor. Presently "boredom” set in; Mod II is designed to give up repetitive behavior after a certain time. Mod II paused, wheeled across the hall and went back on the other side. It went to the head of a flight of stairs, retreated, got its head stuck through the railings, extricated itself, crossed the hall, returned to the outlet where it had started. There, groping first for a good placement on the cover plate and then adjusting the height of its prongs, Mod II plugged itself in. The main motor stopped; only the blowers could be heard. Mod II was recharging. My guides suggested that as this would go an for about 40 minutes perhaps we should do the same, so off we went to the cafeteria for a little recharging of our own.
When we returned Mod II had a surprise for us; it had quit feeding early and taken off on its own. Now it was bumbling about; still traveling and extricating itself but in such an odd, stop-and-go, mode-changing way as to show that it was somehow malfunctioning. When one of its control systems fails others usually can take over; generally it changes "modes" more often in such a case.
The modes of the machine are behavior patterns set up in the circuitry; when one pattern fails to cope with a situation or goes on too long another replaces it. At present the developers don't remember how many modes are in Mod II. Samples are the Rattle-Out or Panic mode, in which the machine simply shakes itself in an effort to get out of a cul-de-sac, and the Pirouette mode, in which it whirls about in search of a new stimulus.
At present its sensors are all "feel" sensors. The head, on contacting certain surfaces, relays certain messages. When it contacts a rectangle of the size of a cover plate, if the battery charge is down, it begins to grope until it is plugged into the outlet. The perforated metal bumper encasing the chassis relays control messages upon contacting objects. The shoes under the chassis, when no longer supported by the floor, give a "back up" order.
A sonic control system has been tried in earlier survival tests; it was not a complete success as it lost control of the machine in a dead area in the hall where Mod II was too far from either wall. The dead area will be defined out of the next adaptation of the sonic system. An optic system is in the works.
So far the ability of the machine to learn is more apparent than real—watch it a while and you will begin to believe Mod II has a sort of Mr. Magoo trial-and-error intelligence. But in the circuitry of the machine certain elements do store up, briefly, a memory of what has just happened; thus repeated actions become more practiced and expert.
In contact with people Mod II is fairly polite. At one point, while trying to find its way out of an office, it cornered us between a desk and a chair, pushed our shank now with its bumper, now with its head, eventually went away. People, even those who deliberately interrupt it, are considered part of its environment, as are the elevators into which it sometimes wanders by wild coincidence. If failure of a survival test results from such an accident—that's that.
After a feeding Mod II tends to go berserk. All the circuitry tends to heat up during this process and to operate abnormally. After it cools down—it cools down.
People not on the Mod II project are getting used to having it around. It must be a little annoying, at times; its whine is not attractive and when for some reason its doorway-skipping tendency fails it bangs against metal office doors with its head. If it gets into an office it must be allowed to get out by itself; a noisy business and time-consuming.
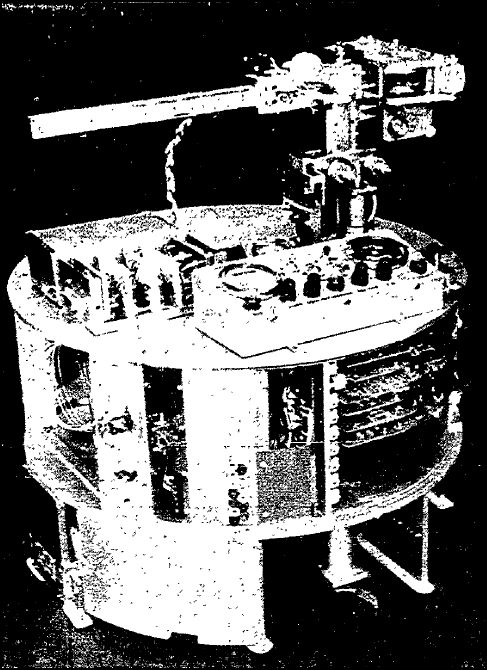
A basic part of Mod II is as well hidden as its circuitry; you can't see its wheels or casters. There are two powered wheels and two casters; steering is done by reversing wheel direction. As a vehicle Mod II is simple enough; its present capacities could easily be increased to cope with irregular surfaces or other means of propulsion. That is not what at APL are after. They want their automaton to increase its own knowledge through experience.—HG
.jpg)
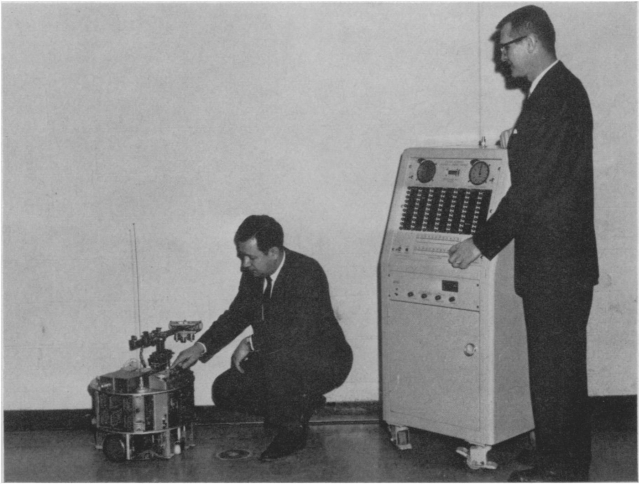
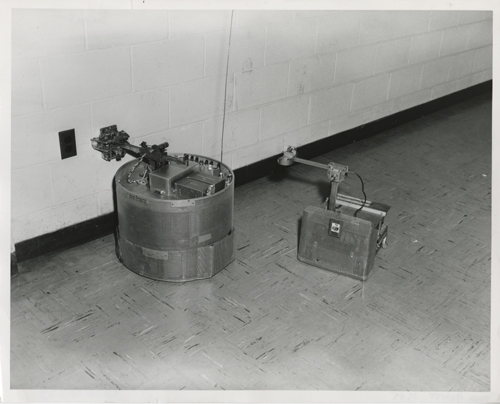
Leonard Scheer / Mod II (left) with Ed Fischer and his telemetering unit.
 Edgar H. Fischer's patent for "Automation Command Circuit" i.e. the Telemetering Unit.
Edgar H. Fischer's patent for "Automation Command Circuit" i.e. the Telemetering Unit.
SCIENCE NEWSLETTER for March 14, 1964
Machine 'Thinks' for Itself
An automaton that is half-beast, half-machine is able to 'think' for itself while surviving on electrical charges in the hallways of a physics laboratory.
By ELIZABETH HALL
A NEW MACHINE at the Johns Hopkins University Applied Physics Laboratory, Laurel, Md., "thinks" for itself.
It "eats" when it gets hungry, "plays" when it feels good, "sleeps" when it's tired and "panics" when it gets into trouble.
Scientifically it is described as a mobile automaton, but its proud developers affectionately call it the Beast. They built the machine, believed to be the only one of its kind in the world, to survive in a natural environment without any human help. That is exactly what it does. It roams the halls of the laboratory and wanders into offices, surprising secretaries and engineers as it "knocks" on the door. When the Beast is hungry, it seeks out electrical wall outlets, plugs in and recharges its 12 silver cadmium battery cells.
The machine, which looks like a kingsize hatbox, has a retractable giraffe-like head, which bangs against the wall in search of outlets.
Beast Feeds SeIf
When its tiny sensors, which follow along the wall's surface, "feel" the outlet, the machine's head positions itself and two prongs lock into the socket. The Beast thus feeds until the batteries are fully recharged and then wanders off in a playful mood, until it is time for dinner once more.
Its developers believe this machine paves the way for electronic devices that could explore the ocean floor, caves and other planets. The Beast has shown that machines can be made to react in complex behavior patterns to a varied environment. The sole purpose of this machine is to survive, the most fundamental desire of every living thing.
In the Beast's electronic logic elements has been stored an ability to avoid obstacles, such as a tangle of electrical cables, people and stairways. When the Beast approaches a stairway, it shudders and backs away. This reaction comes from eight little white "shoes" around its circumference. The shoes indicate holes in the floor or a loss of support.
As the machine nears the edge of a step, one little shoe that normally rests on the floor drops down, causing the brain to react and the machine to draw back.
Should the machine get tangled up in a railing with its head caught between two poles, it wiggles its head back and forth like a child's hand caught in a fence railing. Then it completely stops and goes into a "panic" mode, before trying another maneuver to get free. To an observer, the machine looks completely human as it bangs along its merry way, stopping to think or decide on the next move.
The Beast is actually the second automaton that was built. The first was a shy little creature called Ferdinand that weighs about 35 pounds. When the two are put together, they look like a large collie and a small cocker rolling down the halls, sniffing at the walls for plugs and occasionally banging together. The Beast can move in high or low gear-a foot a second or three inches a second–and can brake, back up or coast. The Beast has been in operation almost a year and has over 400 hours of operating time. More than three-fourths of the time has been spent in feeding at the outlets.
Stores Commands in Memory
When it is time for the machine to go to sleep, it receives a command via a telemetering-command system which it stores in its memory. It will retain this command for several hours before finally carrying it out. The telemetering system enables engineers to follow its forward progress through the halls and know what it is doing at every step of the way.In addition to the command-telemetering system and its touch sessors, the Beast has recently been equipped with two ears-a sonic system that enables it to coast freely down the center of the hall when it is in a playful mood, avoiding people and other obstacles by pulses bounced off the walls and reflected back. Hopkins engineers are also working on an eye for the beast-an optical scanning system that would spot electrical sockets at mealtime.
Intelligence Similar to Ant's
'The Beast's intelligence is similar to that of an ant," George Carlton, supervisor of the Adaptive Machines Group which developed the automatons, told SCIENCE SERVICE. "Ants get along very well, even if they're not very bright, and they have a set pattern of responses in a varied environment."
A third automaton more closely resembles the human nervous system in that it relies on artificial neurons for sensing its surroundings. The continuous sensors in this machine result in smoother movements instead of the jerky banging action of the other two. The first two machines are composed of standard electronic equipment similar to the logical basis of a computer. But unlike a computer, these machines receive many inputs or sensations all the time and must sort through them and decide on a course of action.
.jpg)
For the later extended Sonar & Vision version – see next post here.
One Reply to “1962-3 – Hopkins Beast Autonomous Robot Mod II (Pre-Vision) – JHU APL (American)”
Comments are closed.