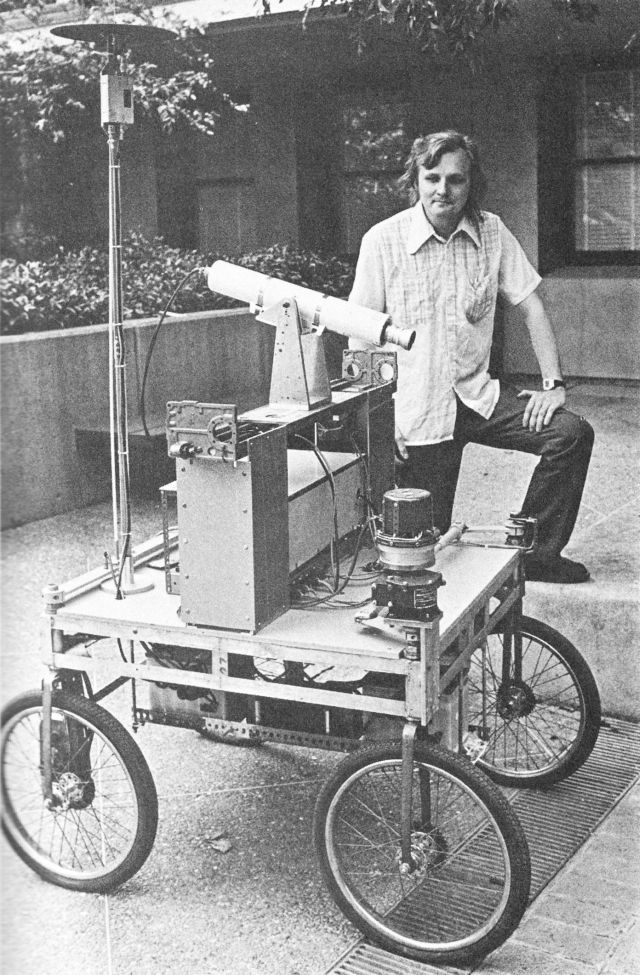
A young Hans Moravec with the Stanford Cart c1977.

One of the more documented Autonomous Vehicles is the Stanford Cart, having an active career starting as a research vehicle for remote moon missions, a White-line follower in 1966, through to its last active role in 1980 as an Autonomous research vehicle.
Les Earnest has the best site giving the history of the Stanford Cart. I found it difficult to cut down or change Les' page, so I didn't and duplicated it below. That way I don't introduce any errors of my own that may be propagated.
Les is an interesting guy. Amongst his involvement in SAIL robotics, he is a historian on Computing, as well as the inventor of what we now call a "blog", and the firsr spell checker!!
1971 Rod Schmidt
In 1971, Rod Schmidt of Stanford University published the first Ph.D. thesis on vision and control for a robot operating outdoors. The Stanford Cart used a single black and white camera with a 1-Hz frame rate. It could follow an unbroken white line on a road for about 15 meters before breaking track. Unlike Shakey, the Cart moved continuously at “a slow walking pace” (Moravec, 1999). The Cart’s vision algorithm, like Shakey’s, first reduced images to a set of edges using operations similarly derived from the blocks-world research. While adequate for Shakey operating indoors, these proved inappropriate for outdoor scenes containing few straight edges and many complicated shapes and color patterns. The Cart was successful only if the line was unbroken, did not curve abruptly, and was clean and uniformly lit. The Cart’s vision system used only about 10 percent of the image and relied on frame-to-frame predictions of the likely position of the line to simplify image processing.
White-line follower – autonomous – 1966? film clip here.
Over the period from 1973 to 1980, Hans Moravec of Stanford University (Moravec, 1983) developed the first stereo vision system for a mobile robot. Using a modified Cart, he obtained stereo images by moving a black and white video camera side to side to create a stereo baseline. Like Shakey, Moravec’s Cart operated mostly indoors in a room with simple polygonal objects, painted in contrasting black and white, uniformly lit, with two or three objects spaced over 20 meters.
Stanford Cart
By Les Earnest
August 2005
The Stanford Cart has had a 45 year career of ups and downs. It was born as a research platform for studying the problem of controlling a Moon rover from Earth. It then was reconfigured as a robot vehicle for research in visual navigation, then went into show business for a few years. It now resides in a home for retired robots at the Computer History Museum while awaiting a comeback.
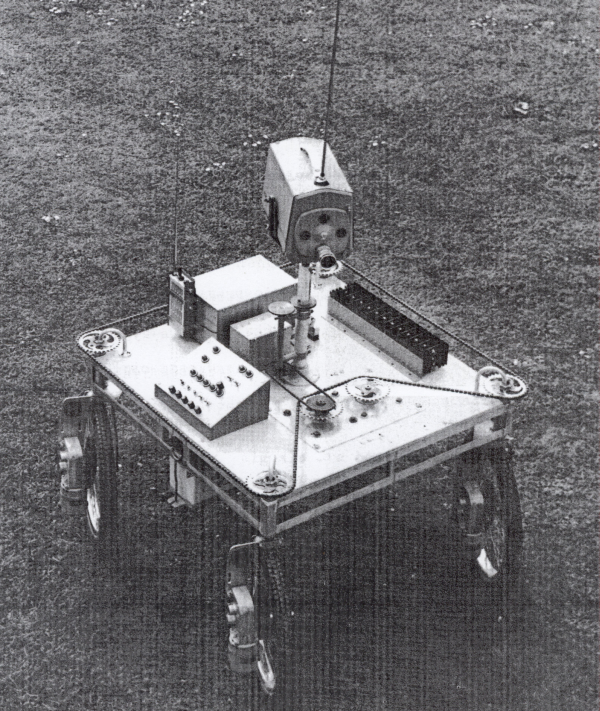
Stanford Cart with cable, 1961
1960-61 – The Stanford Cart was originally constructed by Mechanical Engineering (ME) graduate student James L. Adams to support his research on the problem of controlling a remote vehicle using video information. He had been working at the Jet Propulsion Laboratory on a NASA project called Project Prospector, which was proceeding with the assumption that someone on earth could zoom around the Moon using a TV camera on a vehicle and a radio control link However Adams showed that assumption to be false.
The Cart had four small bicycle wheels with electric motors powered by a car battery and carried a television camera with a fixed view in the forward direction. Tests were conducted using both 2-wheel steering, like a car, and 4-wheel steering, in which the wheels and television camera swivel together. The cart was connected by a very long cable to a control console with a television display and controls for steering and speed. A magnetic tape loop made it possible to vary the time delay of steering commands, to simulate communication
delays.
Adams explored the controllability of the vehicle while avoiding obstacles with various combinations of communication delay and speed. When steering commands are delayed by communications there is a tendency for the operator to over-steer and lose control. Among other things, Adams showed in his dissertation that with a communication delay corresponding to the round trip to the Moon (about 2 1/2 seconds) the vehicle could not be reliably controlled if traveling faster than about 0.2 mph (0.3 kph).
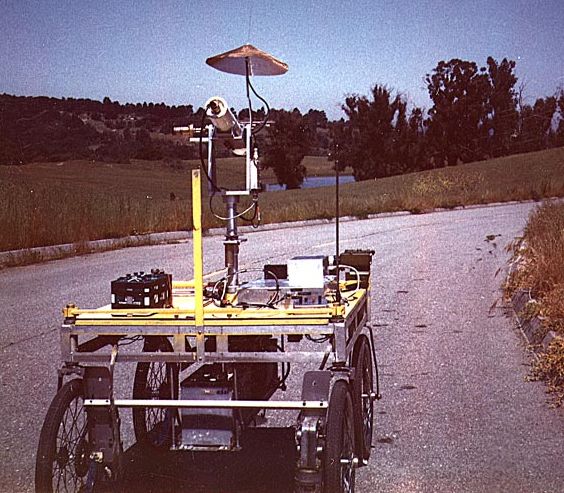
Stanford Cart with radio links, 1963
1962-63 – Mechanical Engineering graduate student Paul W. Braisted devised a scheme to improve the controllability of the vehicle by adding an analog computer that functioned as a predictor that took into account preceding steering commands and put a bright dot on the television screen at the predicted location of the cart when a current steering command would begin to take effect.
With this addition the vehicle could be controlled at 5 mph (8 kph). Still there was a fundamental limitation on teleoperation in that if the travel during the time delay is greater than the distance from the vehicle to an unseen obstacle there is no way to avoid hitting it. Braisted completed his dissertation in 1963.
However, the immediate prospect of applying this technology was put off as a result of President John F. Kennedy's announcement on September 12, 1962 of the U.S. manned mission to the Moon.
Stanford Cart at SAIL
1964-71 – The cart evidently sat unused in an ME laboratory until 1966 when Les Earnest, a senior research scientist who had recently joined the Stanford Artificial Intelligence Lab (SAIL), found it and talked its creator, James Adams, into letting SAIL use it to try navigating on the road around SAIL under computer control using visual references. However the radio links and other electronics that had existed earlier had vanished, so he recruited Electrical Engineering PhD student Rodney Schmidt to built a low power television transmitter and radio control link and undertake the visual guidance project.
SAIL was granted an experimental TV license by the Federal Communications Commission for Channels 22 and 23 and experimental operation began with a human operator controlling the cart via the computer based on television images. Prof. John McCarthy became interested in the project at this time and, as Director of SAIL, took over its supervision. Using the KA10 processor, which ran at about 0.65 MIPS, Schmidt was eventually able to get the cart to automatically follow a high contrast white line under controlled lighting conditions at a speed of about 0.8 mph (1.3 kph). Schmidt completed his dissertation in 1971.

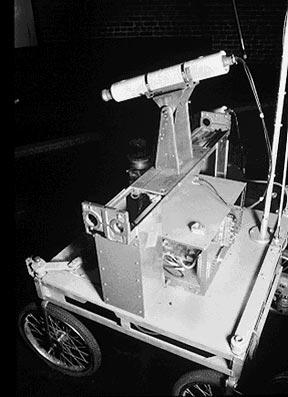

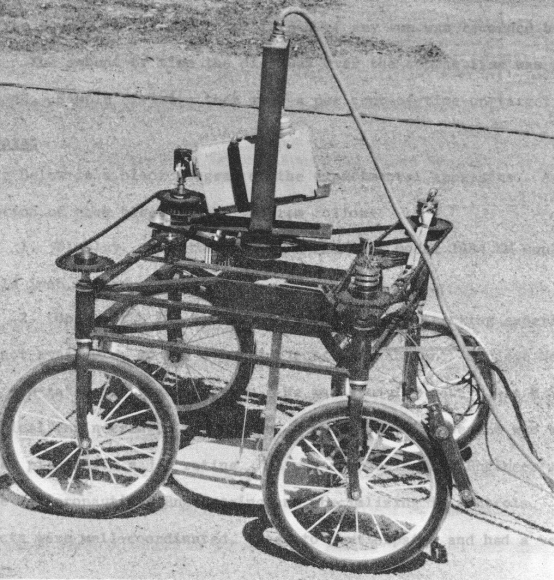
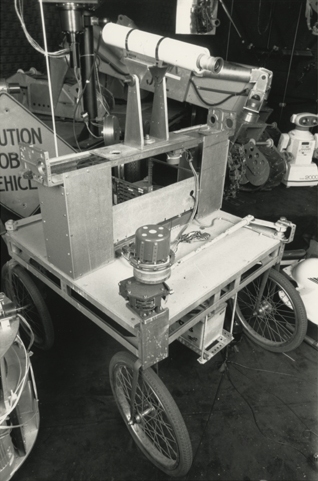
Stanford Cart with slider, 1979
1971-80 – PhD candidate Bruce Baumgart and a few other graduate students experimented with the cart before moving on to other thesis topics. The cart was changed from 4-wheel to 2-wheel steering during this period. Hans Moravec, who had come to Stanford specifically to work on visual navigation, stayed with it but suffered a setback in October 1973 when the cart toppled off an exit ramp while under manual control and ended up with battery acid throughout its electronics.
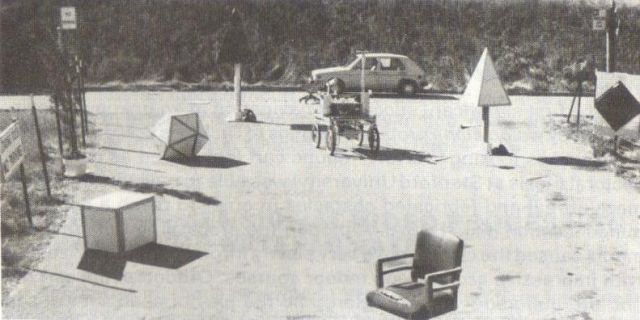
Moravec was able to enlist the aid of roboticist Victor Scheinman in 1977 to build a “slider,” a mechanical swivel that moved the television camera from side to side allowing multiple views to be obtained without moving the cart. Using the KL10 processor then available, which ran at about 2.5 MIPS, Moravec was eventually able to use binocular vision to navigate slowly around obstacles in a controlled environment. The cart moved in one meter spurts punctuated be ten to fifteen minute pauses for image processing and route planning. In 1979, the cart successfully crossed a chair-filled room without human intervention in about five hours. Moravec completed his dissertation in 1980 and there is a short video of the cart in action.
1980-2000 – After SAIL was shut down in 1980 the cart again went into storage until 1987 when, at the request of the Computer Museum in Boston, a number of retired robotic devices were sent to a new exhibit assembled by Oliver Strimpel.
The Smart Machines Theater, later renamed Robot Theater, was a collection of artifacts on stage, lit up in sequence with some actually moving in their moments of glory, synched to a video, proving that even old robots can have a second career in show biz.
2000-present After the Boston museum shut down, the robots and other artifacts were sent to its successor, the Computer History Museum in Mountain View, California, where the cart rests today. It likely will re-emerge in a future exhibit.
Successor
The modern SAIL, under the direction of Sebastian Thrun, developed a robot vehicle called Stanley, which in 2005 won the DARPA Challenge, a race across the Nevada desert.
Acknowledgement
Thanks to James Adams, Bruce Baumgart, Hans Moravec, and Oliver Strimpel for providing information or reviewing earlier drafts of this account.
References
The following Ph.D. dissertations at Stanford University came out of research with the Stanford Cart.
[1] Adams, James Lowell, Remote control with long transmission delays, PhD in Mechanical Engineering, 1961.
[2] Braisted, Paul Wilder, Study of a predictor for remote control systems operating with signal transmission delays, PhD in Mechanical Engineering, 1963.
[3] Schmidt, Rodney Albert, Jr., A study of the real-time control of a computer-driven vehicle, PhD in Elecetrical Engineering, 1971.
[4] Moravec, Hans Peter, Obstacle avoidance and navigation in the real world by a seeing robot rover, PhD in Computer Science, 1980
One Reply to “1960 – Stanford Cart – (American)”
Comments are closed.