English text translated from the original German: (for pictures and diagrams, see pdf below)
The Cybernetic Model "Tortoise"
Cybernetics – In recent years, a new science was born. It enables machines to replace with highly skilled human labor, eg by electronic calculators. These machines are very complicated in structure, and only specialists with high qualifications to deal with them properly.
To the study of cybernetics are very well cybernetic models with information stores, which the animal brain can exert partial analog functions. One such model is the "turtle" developed by the Institute of Automation and robot of the Academy of Sciences of the USSR. Publication of its construction in the magazines "knowledge is power" and "Radio" No. 3/1958 encouraged the study groups for robot and automatic Young engineer at the stations in Sverdlovsk region at this, even to make such a model.
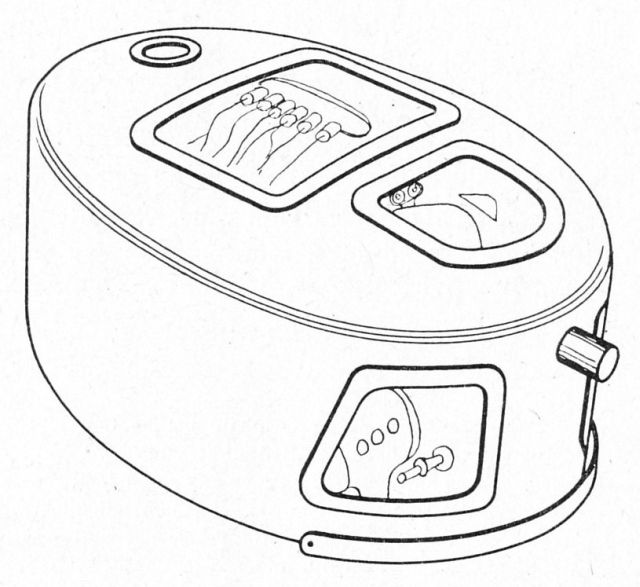
Figure 11
View of the model
89
The present article is roughly the construction of such a "turtle" described, it is very easy as standardized components can be used.
The main task of this model is to help the students of the upper classes while the basics of automation and cybernetics studieren.1
The behavior of the "turtle"
Observed the movements of the "turtle" obstacles creates the impression that they possess animal-related reflections. Reacts to light you on audio signals and also bumping into.. Though primitive, but it has an organ of sight, hearing a , a sense of touch and memory (memory with a conditioned reflex can be briefly formed).
Here is the proof of their sensitivity to light., The "turtle" moves in a circle on their base until they discovered the source of light is the light beam detected, it moves straight to the lamp to the visual system consists of a photoresistor This photo resistor switched on.. light on the relay d 1 the control magnet (Part VII) from, so that the move can "turtle" straight. Here comes the "turtle" an obstacle, they returned a short run to move again after a little sideways rotation forward. This process is repeated as many times until a way is found to get around the obstacle.
Audio signals to the "turtle" reacts in the following way: If a whistle is given, it will stop for about a second.
The interesting thing about the "turtle" but their "memory", which is the formation of a conditioned reflex of importance. A conditioned reflex occurs whenever different, but at least two stimuli are combined. For the "turtle" the combination of sound and shock stimuli was chosen. Exceeds the "turtle" an obstacle and at the same moment you will hear a whistle, the result is a conditioned reflex. Now "suspects" the "turtle" at every whistle a
1 The "Turtle" is a principled solution for a cybernetic model that responds to three stimuli and can emerge a "conditioned reflex". There are of course also other variants, you can work with transistors that use other relays and also make the program more extensive. However, this model is to encourage the work of communities of our country to deal with such problems and also to develop new technical solutions in creative work.
90
Obstacle and executes the corresponding movements to bypass the obstruction. After a certain time (this time is determined by the corresponding timer) goes out of the conditioned reflex again, if not both stimuli occur simultaneously again.
Cybernetic models have generally fulfill an experimental feature. With them it is possible to simulate individual processes of the nervous activity of the living organism. Analogies are derived from the behavior of living organisms and machines for the development of automatic information processing systems is of utmost importance. This makes it possible logical actions performed by the person on the basis of information to transmit cybernetic machines or mechanisms. This has great significance for the growth of labor productivity. The introduction of automatic regulation and control in the production always leads to a significant acceleration of production and to increase the quality. Automated systems and aggregates react precisely, not tired and are less sluggish than man.
The circuit of the "turtle"
In the overall structure and the "turtle" there were the following problems to solve:
1 Recording the information (light, sound, shock). Forward to a computing element and storing the information in the formation of the conditioned reflex.
2 Realization of the output information by movement of the drive and control mechanisms. To achieve these objects both electronic and electro-mechanical units are required.
The schematic diagram (Fig. 12) shows the circuitry recording, processing and transformation of information into control operations. For a better overview, the individual units were included only in the block.
Part I
As a photo sensor resistor is used. It is also a photocell or a photo element to use, but then an electronic amplifier is required. The potentiometer 1M ohms lin is used to control the sensitivity of the photoresistor. The sensitivity
91
11 part
As a simple two-pole contact feeler is used. By the contact of the circuit of the left coil of the relay d 2 is closed when pushed. This is triggered by relay d 4 and d 5, the backward and sideways movement. The timer IV (Z 1) finished the operation after a short time.
Figure 13
The photoresistor circuit for Part I
24V Figure 14
Circuit of the touch probe for Part II
Figure 12 a schematic diagram for the technical operation of the turtle
Part III
As a probe microphone (single crystal microphone) is used. A two-stage amplifier where the incoming audio signal is enhanced in that a rectifier bridge in the left coil of the relay 3 d, a corresponding current flows. It is recommended that the sound frequency of the amplifier set so that only signals of a particular frequency will be processed in order to avoid interference from external noise.
Figure 12b with this circuit for the relay d 1 and d 4 maneuverability at around obstacles can be increased
is set so that the photo-resistor is not responding to diffuse light. For this reason, the use of a simple lens (Fig. 18) is very convenient.
92
Figure 15 circuit of the microphone amplifier for Part III (the tubes correspond about our EF 14)
93
When switching the relay relay d 3 d 6 is turned on and brought the turtle briefly to a halt. The duration of this operation is controlled by the second timing element (Z 2).
Part IV
The two timing elements Z 1 and Z 2 have a memory function. The incoming signal triggers an operation and will be for a short time (the duration is determined by the combination of C 2, R 6 set) is stored. No signal, the circuit for both windings of the relay d 2 and d 3, and C 2 is interrupted current. If a signal that flows in the left-hand winding of the relay power d 2 or d 3, and switched by the relay. Here, C 2 invites to over R 6 and the glow lamp ignites. Thus, the circuit of the right coil of the relay is closed briefly and the process ends. The circuit is therefore only briefly closed because it is unloaded immediately after switching the capacitor C through R 1 second For this circuit polarized relays are provided with zero position. However, it can be used with two windings, simple relays, however, the circuit has to be changed.
Figure 16
Circuit of the timers (Z 1, Z 2) of Part IV
Part V
The timer Z 3 is required to form the "conditioned reflex." If simultaneously on II and III, a signal, then the relay d 4 and d 6 set the grid of the tube for a short time to ground and discharging the capacitor C 10 . makes the anode current and the relay d 7 increases attracts. According to charging of C 10 drops in the tube again, the anode current., the time for charging of C 10 corresponds to the duration of the "conditioned reflex" (for the present model were about two minutes selected).
94
Figure 17
Circuit for the timer Z 3 in Part V
Part VI
As a drive motor an electric motor is used 24 V with the field winding. Ports 1 and 2 are for the field winding and are used to change the direction of rotation by the relay d 5 reversed. Via the terminals 3 and 4, the armature of the motor is fed.
By Relais d 6 is the exchange Contact 6b in a sound, the power supply is interrupted to the collector and the model stopped for a short time. The speed should be about 5 to 10 cm / s. With appropriate variation of the circuit can be used also a Permamotor.
Part VII
This part constitutes an electromagnet by means of which the circular motion of "tortoise" is controlled. Smaller no light on the photoconductor, then the circuit of the electromagnet is closed. This
Figure 18 look for the photo resistor
95
Figure 18a The turtle Elsie
On the shell of the turtle a candle (1) had been secured, a second candle (2) was placed at some distance. Between the candle and the turtle was a barrier (3). The shutter of the camera was opened and the turtle was left to itself. Your path is recorded in the photo. (4) starting position of the turtle (it starts moving toward the light source). (5) collision with the obstacle. (6), bypassing the restoration of the obstacle and movement direction of the light source. (7) The turtle happened to approach very close to the candle, the light was quite strong, the turtle was forced to retreat, they bypassed the candle. (From: IA Poletayev: Cybernetics German VEB Verlag der Wissenschaften, Berlin 1962, page 233.)
Figure 19 Base plate with drive and control
is given to the steering wheel, a rash of 20 °. In light relay drops d 1, and the steering wheel gets a straight-ahead position.
The mechanical structure
The "turtle" has an oval shape and the drive control is initially in the size of 220 mm X 290 mm. Built on the base plate. Assembly of electronic equipment should be done only when the drive and control function properly.
The chassis is composed of three rubber wheels, the diameter should be about 50 to 60 mm.
The Figure 19 shows the basic mechanical structure of the drive and the controller. For driving a double worm reducer was chosen because it allows the use of small gears. The arrangement of the worm gears and is shown in Figures 20 and 21.
96
Figure 20 Cross-section A A
Figure 21 section B B
7 [28004]
97
At the intended speed of 50 to 100 mm / s and the given wheel diameter, the rotational speed of the drive shaft does not exceed 20 to 30 U / min. In the example used with 32 and 24 teeth for a motor with 6000 to 8000 r / min and two common worm gears. If other wheels or a different motor is used, the reduction must be recalculated.
Greater friction loss can be avoided if only one wheel is rigidly connected to the drive shaft.
Figure 22 Cross-section C C
The principle of the magnetic control is seen in Figure 19 and 22. The steering wheel is located in a fork, in which a lever is attached. On this lever is effected by the solenoid, the spring, or a control stop. The stop control should be about 20 ° when the electromagnet. The steering wheel by the coil spring is held in the normal position.
Freely edited by a methodical instructions of the station Young Engineers in Sverdlovsk, published in 1959.
See pdf of referenced chapter here
Sverdlovsk, name of the city of Yekaterinburg, Russia, from 1924 to 1991
Sverdlovsk, Ukraine, a town in Ukraine.
I suspect this Tortoise is from the Russian Sverdlovsk, not the Ukraine.