.jpg)
![]()
.jpg)
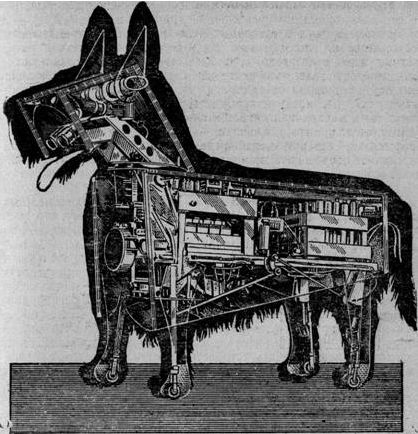
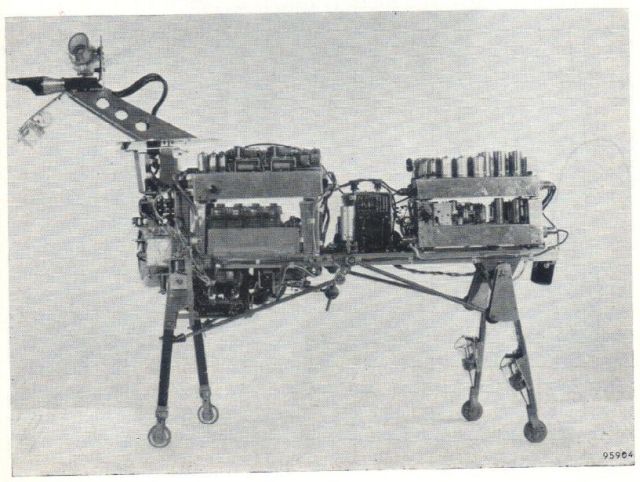
A.H. Bruinsma Roboter Schaltungen Orig 1958 German edition, Eng translation 1965. Actually called “Cyber” (pronounced Seeber). These books are Philips publications, and I think Bruinsma worked for Philips.
Notes: 1. Anne Hendrik Bruinsma is probably more well known for his work in Radio-control. (I previously thought Anne was a female name, but can be Male in the Netherlands. Thanks to his grandson, Wyste for this correction.)
2. I’ve also seen an article (“Man and Time”, J. B. Priestley p129, 1964) showing Cyber and incorrectly referring to it as the 1929 Philidog!
Notes from book:
Bruinsma's definition of a robot: Circuits or machines responding independently and unfailingly to certain stimuli from outside….They do not acquire skills not built into them by the designer.
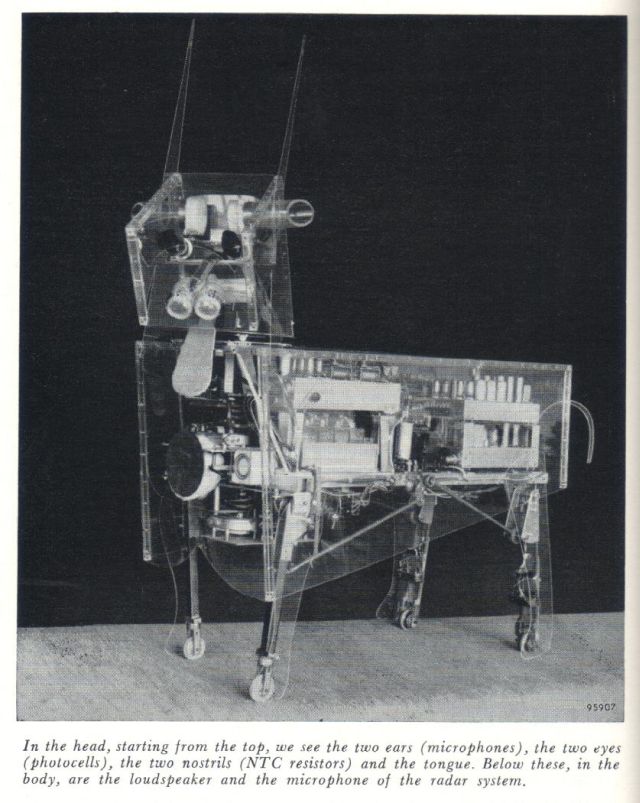
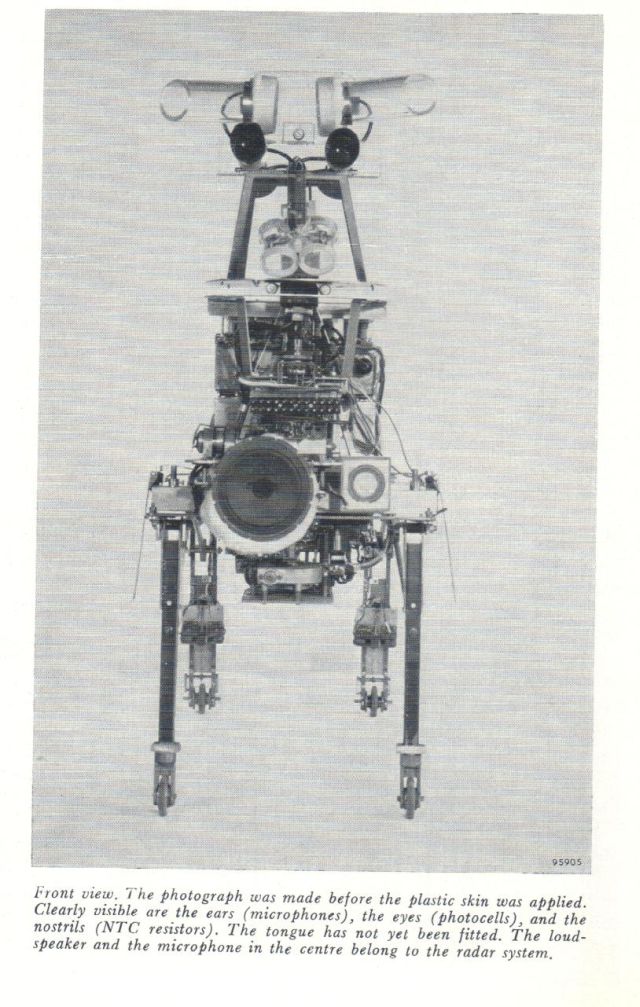
The Eyes
Photo-electric cell:
Note: the book gives quite a detailed description of how the PEC works, and in particular, gives the chacteristics of model no. 90AV, the same as was used in Dr Grey Walter's tortoises.
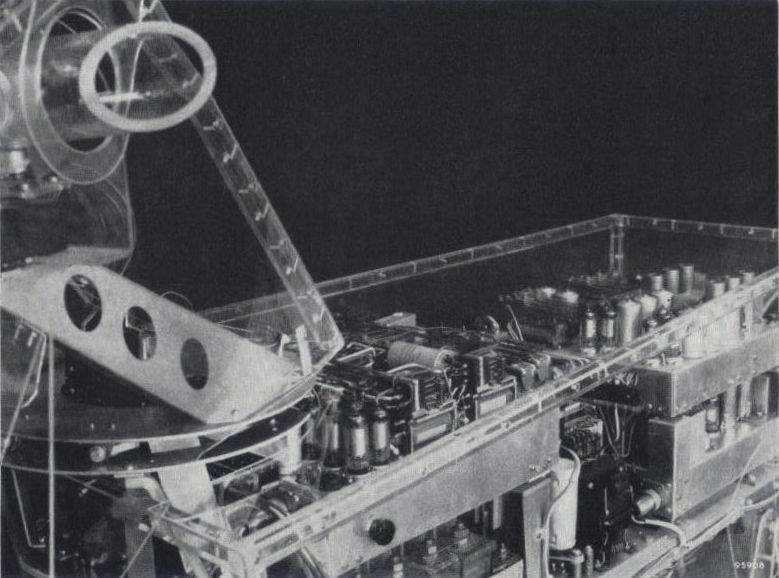
Cyber is employed with a "stereoscopic" photo-electric cell circuit. Mounted on a turntable and can track a light source. The turntable turns through a small arc swing. When no light is detected, the seach turns to and fro from one end of the arc then back to the other end. The scan is not continuous in one direction. The Eyes cut out when the ears are activated.
The Ears
One Microphone used in each each and wired up in a stereophonic circuit. They are mounted on the same turntable as the PEC (ie the head and neck). The ears react to different signals, 1) a whistle actives the stereophonic circuit and will track the source; 20 The robot's name (pronounced "Seeber") and will stop for 20 seconds upon hearing its name, and in the radar circuit described later.
Sense of Touch
A microswitch on each side covered by a disc so covering as large an area as possible. The robot will reverse the steering direction for a short period of time. As this touch circuit is 'primary' the robot may become confused in what it was performing prior to the contact.
Nose
In this case, the nose is used for temperature sensing, utilising Negative Temperature Coefficient (NTC) resistors. The circuit is tuned for the warmth of a hand or the heat of a hot-dog sausage. A hand held 10cm in front will trigger the circuit after about 1 minute. A hot sausage will trigger the circuit much quicker. There are two resistors, so if a hot dog is put in front of its nose but to one side, the robot will turn its head in the direction of the hot dog, then operate the tongue as if to lick it.
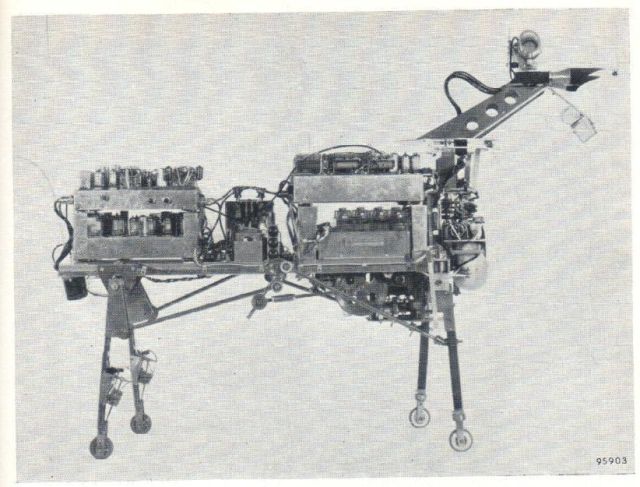
Seeing in the Dark – Acoustic Radar
The sound generator, for practical reasons, sounds like a kind of barking noise for about 3 seconds. The circuit is tuned to be sensitive up to 1 metre. If an object is detected in that space, the robot will stop, then reverse. If the robot, when walking backwards, happens to come into contact with another by its tail, the robot will stop going backwards and move forwards again. In effect, the robot "barks" at any object encountered. This may be the first cybernetic animal or robot that has utilised acoustic radar.
Other notes: The neck and steering of the front legs are not run off the same spindle, but are separate.