Fig. 2 of New Scientist article
Alex Andrew graduated in Mathematics and Natural Philosophy at Glasgow University, Scotland, then joined the Departments of Physiology and Psychological Medicine there. Part of this time was spent on leave of absence with Warren McCulloch’s group in MIT. Work in Glasgow was largely on electronic instrumentation for neurophysiology, and also on neurophysiology as such, and in MIT was on the visual system of the frog. He then worked on machine learning at the National Physical Laboratory, Teddington, England, and gave a paper at the first IFAC Congress, Moscow 1960. He later joined the management consultancy firm SIGMA, managed by Stafford Beer, for 2 years, followed by a year in Heinz von Foerster’s group in the University of Illinois, and was then a member of the Department of Cybernetics in the University of Reading, England, until he took early retirement in 1982 and joined with his wife Joyce in commercial activity. The academic year 1987-88 was spent in the University of the Aegean, Izmir, Turkey, teaching Artificial Intelligence.
A paper written in 1965, while with Heinz von Foerster’s group, introduced a principle of “significance feedback” of which one version is equivalent to the “backpropagation of error” that came later and is the basis of most work on artificial neural nets in recent decades. The place of continuity in the operation of intelligent systems, real or artificial, has been a primary interest arising from consideration of machine learning.
Alex Andrew 
Notes from correspondance between David L. Buckley and Alex Andrew, September , 2009
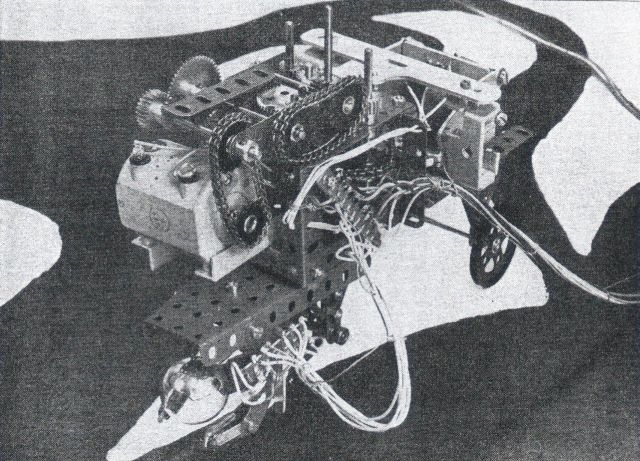
I made a crude mechanical trolley at around that time, put together very quickly using Meccano. It was coupled to Uttley’s Conditional Probability Computer and was able to follow black/white edges irrespective of which colour was on which side. It had a simple way of learning which kind of response worked for it. It wasn’t very profound, but it was demonstrated at an NPL Open Day and at a Royal Society Soiree. Grey Walter saw it at the Open Day and commented that it was interesting that such devices are almost always three-wheelers.
From a book in which I discuss the Conditional Probability Computer in some detail. I refer in them to a demo in which the five channels are labelled “Command to sit”, “Action of sitting”, “Reward (bone)”, “Action of begging”, “Command to beg”.
The front of the trolley had an extension that pivoted with the steering action on the front wheel, with a light, and photo-diodes at each side. When the photodiodes are illuminated differently (one over white and one over black) the trolley drives ahead. Otherwise the trolley stops and one or other of two inputs of the CPC is activated. One input corresponds to “both white” and the other to “both black” and they are treated like the “beg” and “sit” commands in the other demo. Two other channels of the CPC correspond to “swing to right” and “swing to left” and which of these becomes active depends, after a time, on what has previously been “rewarded” by a return to the state of “one white and one black”, corresponding to “Reward (bone)”.
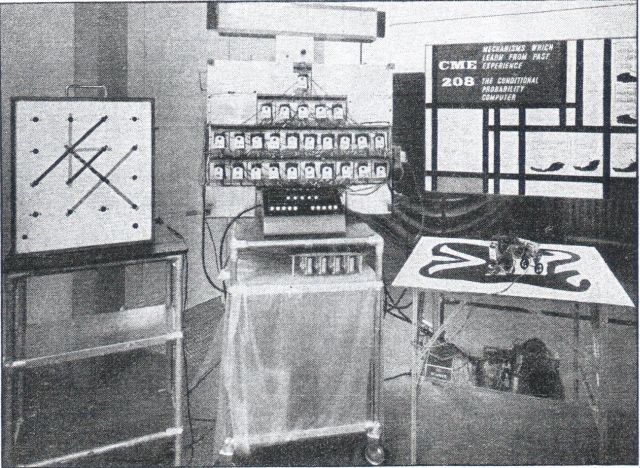
In Fig. 2 of the New Scientist article there is a square board on the left, with holes which, I think, covered photocells. I think it was designed to learn the discrimination shown (instinctively) by some birds, as found by Konrad Lorentz. In the experiment with birds, a cardboard cut-out was made in the shape of a bird with wings and with a long neck in front and a short tail. It was found that, if the shape was passed overhead with the long neck in front it caused no alarm to birds because a bird with a long neck is not a bird of prey. When the same shape was passed over with the short “tail” in front, it caused alarm because it was then like a bird of prey with a short neck. I am fairly sure that shapes were passed over the square face with photocells and the CPC learned the predator/friend discrimination.
(Uttley / Andrew pdf's here)
Uttley Conditional Probability In a Nervous System 1959
Andrew, Dr. A. M. , "Machines Which Learn" New Scientist 27 Nov 1958 pp. 1388-91
Andrew, Alexander A Conditional Probability Computer
One Reply to “1958 – Conditional Probability Computer / Trolley – Uttley / Andrew (English)”
Comments are closed.