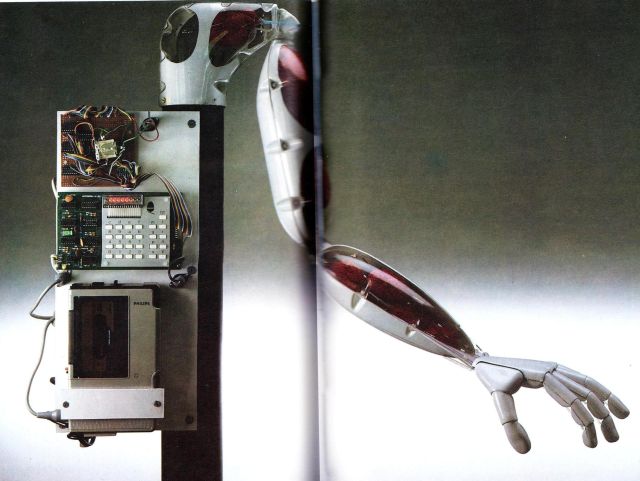
The arm above is based on an experimental system of pneumatic muscles. Air is forced into the muscle bags, which expand but shrink in length. String tendons link the muscles to the bones, resulting in movement of the limbs. The robot was developed by The Original Android Company [RH-2012-Now defunct], in association with the Royal College of Art, to test the viability of having moving mannequins in shop window displays. The microcomputer on the left drives a series of servo valves, which feed pressurized air to the muscles.
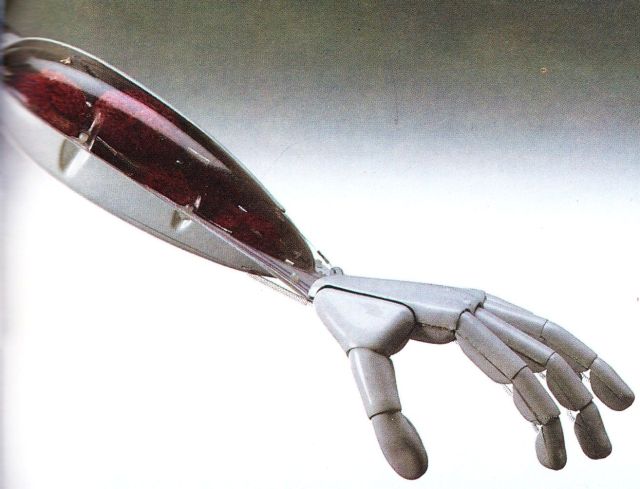
The air muscle used here is possibly the first example of the Netted-type of Pneumatic artificial muscle (PAM).
NEW ARM: Inventor Tim Jones has won a prize for his invention of a robotic arm, which will help the disabled.
Video clip dated 11.Sep.1981 – see 4min 48 sec into video clip for Tim Jones' robot arm.




Tim Jones went on to develop many more service robots, including the R-Theta mobile robot of 1984 for UMI, which the arm later became the RTX teaching arm (for OxIM).
Tim Jones was involved in service and rehabilitation robotics, for Exact Dynamics in the Netherlands making the iARM.
As from the comment below, Tim is now a freelance designer/inventor responsible for the Harmonic Linear Drive manufactured by Animatics Inc and over the decades has worked on various innovative automation and robotic projects.
Tim – what is your email – been trying to contact you for years. I am frequently in London.
Cheers
Just for the record I don’t work for Exact Dynamics, though I was involved with them as part of a European funded project about 14 years ago. I am a freelance designer/inventor responsible for the Harmonic Linear Drive manufactured by Animatics Inc and over the decades have worked on various innovative automation and robotic projects.