

Revolutionizing Techniques of Orthosis and Prosthesis
Professor Pierre Rabischong of the Montpellier Propara Centre watches as a female patient and her physical therapist use a machine developed by Professor Rabischong. This machine allows the patient in rehabilitation to maintain her balance while inciting her muscles to move. The system functions according to the master-slave concept. The physical therapist makes the movements first and the machine transfers them to the patient's machine, who then follows.
Stock Photo ID: 42-17253903
Date Photographed: 01 September 1983
Credit: © Eric Preau/Sygma/Corbis

patient greater autonomy. Photo courtesy of INSERM
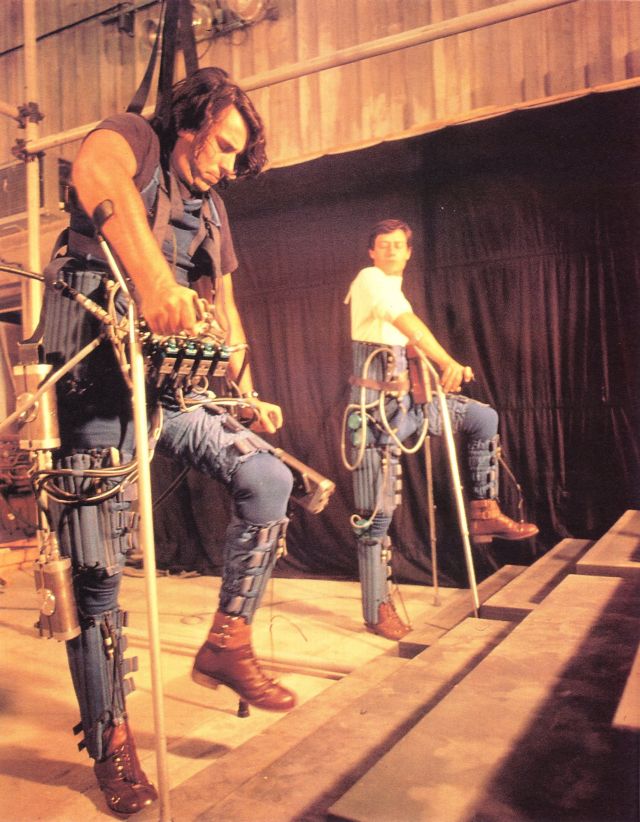
4.4.2.2 ASSISTED WALKING
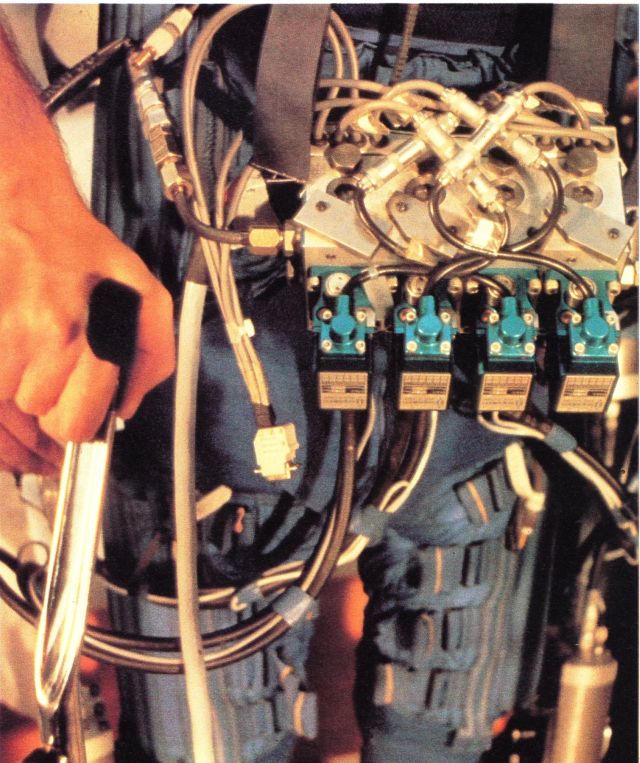
Following on from the work of Tomovic the Yugoslav, Rabischong applied the problem of assistance to those with paralysis of the lower limbs using a motorized orthesis. His original idea (Rabischong et al., 1978; Hill, 1976-1) consisted of controlling the orthesis by unilateral positional servocontrol using two exoskeleton legs worn by the patient [see Figure 4.4.2.(2)]. The second version, currently being used experimentally, is hydraulically powered and was produced by Renault. This system is highly promising for training limbs; the extension towards autonomy on the basis of a kinematic computer model of walking is envisaged in the long term. The patient would use two walking sticks.
Source: Robot Technology – Vol 3a – Teleoperations and Robotics: Evolution and Development by Jean Vertut and Philippe Coiffet, 1986.
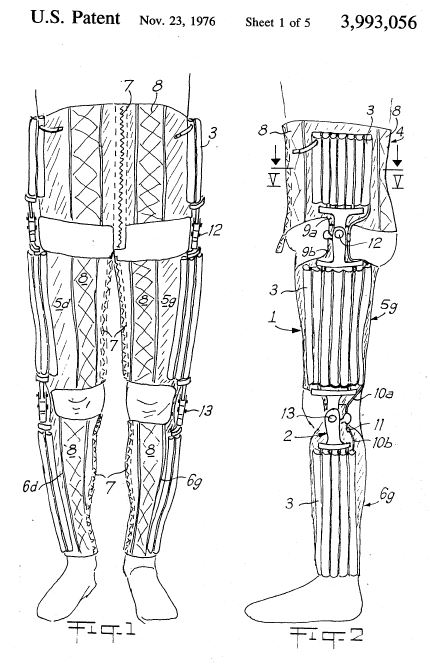
Patent US3993056
Publication number US3993056 A
Publication date Nov 23, 1976
Filing date Jan 21, 1976
Inventors Pierre Rabischong, Jean Pierre Louis Bel
Original Assignee Institut National De La Sante Et De La Recherche Medicale
Abstract
An orthopaedic appliance which enables paralytics to stand erect has a fabric garment formed in separate pieces to be tightly wrapped around body parts located between joints the pieces having an inflatable support structures in the form of vertical tubes and devices connecting garment pieces located on opposite sides of a body joint in the form of a separate row of rigid parallel pins attached to the inflatable structure each garment piece and a pivot which can be hydraulically or otherwise driven, interconnecting the rows of pins. The inflatable tubes are located in elongate fabric sheaths and the pins are inserted in fabric sheaths defined between the tube sheaths so that when the tubes are inflated they clamp the pins between them.
See other early Teleoperators, Exoskeletons and Industrial Robots here.