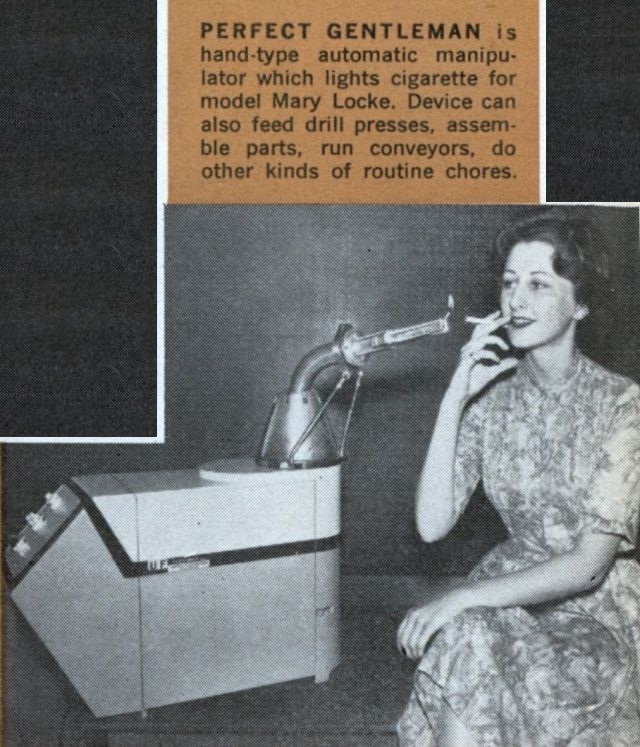
Mary Locke getting what robots like to give.
Patent Information:
MECHANISM FOR REMOTE MANIPULATION OF INDUSTRIAL OBJECTS Anthony J. Kaye et al
See full patent details here.
Patent number: 3173555
Filing date: Sep 7, 1962
Issue date: Mar 16, 1965
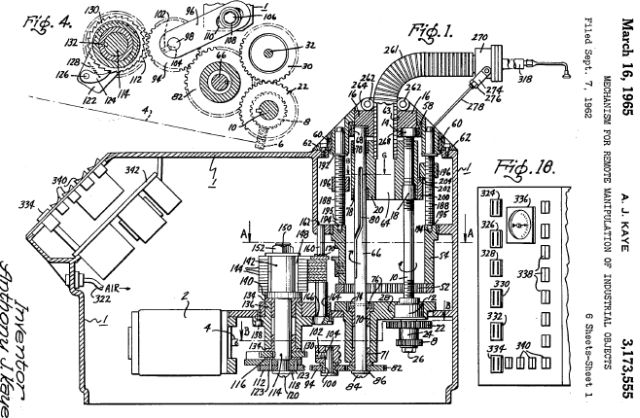
This invention relates generally to mechanism for positioning or otherwise manipulating objects, tools and the like in industrial operations, including programmed industrial manipulators. In a preferred form, it comprises mechanism affording duplication of the human arm's manipulative skill in placing physical objects in an infinite number of attitudes •and positions in a three dimensional space and operated and controlled by memory or program devices with which the desired movements of the mechanism may be recorded and then subsequently employed to cause the mechanism to repeat the record movements.
Mechanisms have been devised in the past which simulate certain movements of the human arm and hand, commonly known as remotely controlled handling equipment, programmed manipulators and the like, operating to duplicate the manipulative skill of the human arm in its ability to grasp, rotate, locate, and otherwise manipulate objects and to do this under the constant control of a remotely located person or suitably designed mechanical, electrical or similar memory or programming medium.
It is an object of this invention to apply a new principle to such art of manipulating objects in space, namely the use of one or more mechanical members acting as tension or compression vectors to guide or restrain the lateral movements of an object carrying member, thus enabling the latter member to position an object in space.
Another object is of embody this new principle in a flexible member or arm, guided and restrained by one or more adjustable such vector members, or "tendons," to precisely move one end of the flexible member and an object carried thereby from point to point in space limited only by the size and range of the equipment.
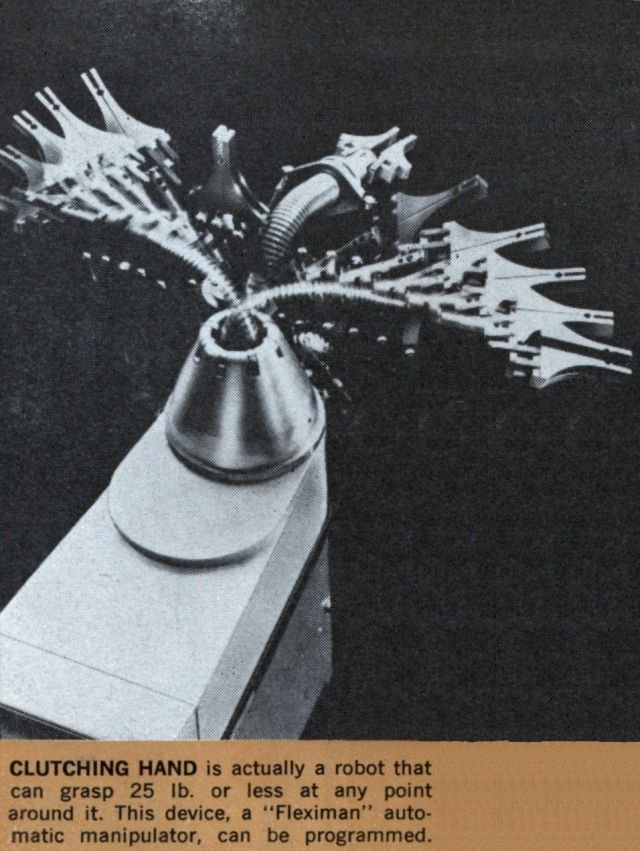
It is a further object of this invention to apply this new principle to a flexible arm which carries a gripping hand and for which a plurality of hand types are provided with the gripping hands being readily interchangeable.
Another object is the provision of such a mechanism operated by 'a single motor unit for achieving three dimensional positioning, as in the assembly of the multiple parts of a product.
Another object is to provide an object handling unit employing this new principle and including mechanisms by which the desired movements of the equipment can be retained and through which the equipment can subsequently automatically, accurately and continually repeat the desired movements.
Other objects and advantages, will become more apparent in the following specification and claims taken in connection with the accompanying drawings which describe and illustrate certain embodiments of the invention.