
Slim Slime Robot
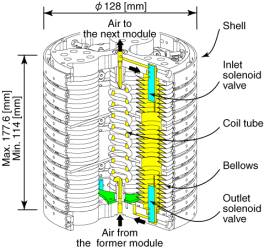
The Slim Slime robot is a robot made up of linearly connecting multiple modules that pneumatically bend and elongate. Inside a module (below), three metal bellows are arranged in parallel at regular intervals with an identical circumference.
Both ends of each bellows are fixed with two disks, and the disks are connected to each other by expanding springs. These bellows elongate when compressed air is supplied, and they shrink when the air is drained out. Each bellow has two solenoid valves embedded, used for the intake and expulsion of the compressed air. The module bends and elongates by controlling the compressed air that is supplied to the three bellows. The module is 128 mm in diameter, from 114 to 178 mm in length, 1.7 kg in weight, and has a maximumbending angle of 30.

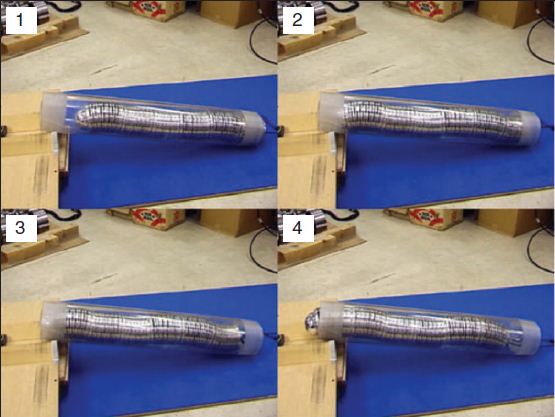
The Slim Slime robot is composed of six connected modules, from 730 to 1,120 mm in length and 12 kg in weight. The Slim Slime robot has realized a wide variety of movement styles by bending and elongating. This robot has also succeeded in performing locomotion in an inclined pipe (bottom).
Built by Takeshi Aoki and Shigeo Hirose at the Hirose Fukushima Lab.
There is a later model, SSR-II which used a "Bridled Bellows".
See other Pneumatic, Fluidic, and Inflatable robots here.