In late 1951, Paul-Alain Amouriq, a Frenchman then aged 17, built a cybernetic tortoise inspired by Grey Walter's as published in a French science magazine Science et Vie (February 1951). Several years later Science et Vie became aware of Amouriq's tortue, and Pierre de Latil visited him and the subsequent article was published in the March 1954 issue.
It uses all-relay logic, no vacuum-tubes are used at all.
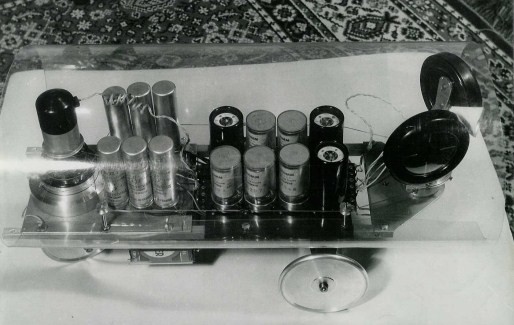
Photo courtesy A.-P. Amouriq 2009.
STOP PRESS – 9th Oct 09 –Wonderful news – Paul A. AMOURIQ saw this post about his "tortue" and posted the first ever comment to my new blog. Thanks Paul.
He has sent through some further information, plus a picture of what 'tortue' looks like now after some technology modifications. See new info at bottom of this post.

Note: The picture of the Tortue below is facing to the right. The single steering wheel is at the rear of the tortoise.
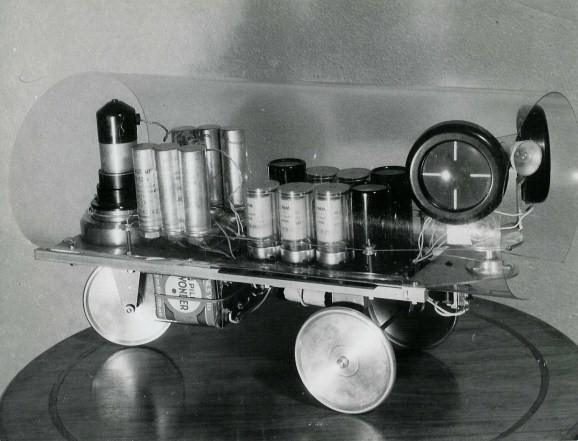 Photo courtesy A.-P. Amouriq 2009.
Photo courtesy A.-P. Amouriq 2009.
Attirée par la lumière et sachant contourner l'obstacle, la tortue de P.-A. Amouriq est le mieux agencé des robots cybernétiques.
P.-A. AMOURIQ REPLACE LES ROUES AVANT DE LA TORTUE, QUI SONT SIMPLEMENT PORTEUSES
UN LYCÉEN A CONSTRUIT UN ANIMAL ARTIFICIEL
Un animal artificiel de plus, et fabriqué par un jeune homme de dix-sept ans ?…
Simple « bricolage » d'amateur imité des précédents, sera-t-on tenté de penser.
Mais d'abord quand Paul-Alain Amouriq, alors élève de « mathelem » à Louis-le-Grand (il prépare aujourd'hui sa licence ès sciences) le construisit, c'était il y a deux ans, et nul n'avait encore donné de descendance aux fameuses « tortues » de Grey Walter.
Ensuite cet engin autonome et automatique n'a rien d'une improvisation. Bien au contraire, il est calculé ; c'est le mieux construit, le mieux agencé des diverses « tortues », le seul qui ne soit pas réalisé avec de simples pièces de « meccano ». Il faut préciser que le lycéen bénéficia du concours d'une grande firme d'appareils de mesures électriques dont son père est directeur.
Tout entière usinée en duralumin, sa machine n'est pas une simple copie améliorée des « espèces » antérieures d'animaux artificiels. Elle présente plusieurs dispositifs originaux.Une inspiration puisée dans « Science et Vie »
C'est en lisant l'article consacré par Science et Vie aux tortues électroniques de Grey Walter que P.-A. Amouriq, comprenant tout l'intérêt de ces premières applications de la cybernétique balbutiante, voulut réaliser une nouvelle «espèce ».
Son engin aurait trois roues dont une à la fois directrice et motrice. A la différence d'Elmer et d'Elsie, premières nées de l'espèce Machina speculatrix, la roue directrice ne serait pas à l'avant, mais à l'arrière. Ainsi les virages seraient mieux « pris », l'engin risquant moins d'accrocher, par exemple, le chambranle d'une porte au-delà de laquelle il vient d'apercevoir une attirante lumière.
Deux sensibilités : un sens nuancé, la vue, et une sensibilité plus fruste, celle des chocs.
Les organes de la vue sont deux cellules photoélectriques qui balaient l'horizon.Qu'il en existe deux et non une seule, peut donner des réactions beaucoup plus subtiles aux perceptions visuelles.
La somme des courants perçus par les deux cellules représente une appréciation de 'intensité lumineuse ; à cette fin, les cellules sont montées en « parallèle », mais leur montage « en opposition » confère aussi au robot l'appréciation de la direction de la source lumineuse.
L'influence de la cellule de droite l'emporte si celle-ci perçoit plus de lumière que la gauche ; ou inversement. Si la lumière se trouve juste entre les deux « yeux », les deux influences se balancent. Quant à la sensibilité aux chocs, elle se traduit par une augmentation de l'intensité dans le moteur de locomotion brusquement bloqué, puisque les roues ne peuvent plus avancer. Voilà donc la bestiole conçue, sensible à l'intensité et à la direction de la lumière ainsi qu'aux chocs contre un obstacle. Restait à décider de quelle façon elle réagirait — car une machine ne pourra jamais « connaître » que par les sens et agir que par les organes dont nous l'aurons dotée.
Paul-A. Amouriq gratifia son engin d'actes simples : avancer à plein régime ou à demi-régime, tourner, ou reculer (un seul régime).Un comportement très avancé
Voyons comment ces actes sont reliés aux sensations que provoquent, par leur présence et leur absence, la lumière et les obstacles. Admettons qu'il n'y ait pas de lumière. C'est un cas particulier d'une perception équilibrée des deux cellules. Le moteur de direction, lequel est naturellement sensible au déséquilibre des perceptions lumineuses, n'entre pas en jeu et la marche est rectiligne. Mais l'absence de courant dans le circuit affecté par l'intensité lumineuse détermine l'introduction d'une résistance dans le circuit des batteries alimentant le moteur de direction ; ce courant d'alimentation faiblit donc, et la marche est ralentie. En même temps, une lampe s'allume à l'avant du robot. Elle symbolise un état dé prudente investigation. D'ailleurs, si la lampe est assez puissante, elle peut par son reflet avertir de la présence d'un obstacle.
Recul devant l'éblouissement, mais sur choc, demi-tour
Admettons maintenant qu'il y a au moins une lumière. L'animal se dirige alors vers elle. Mais, dès que l'intensité lumineuse devient trop forte, il recule jusqu'à ce que l'intensité de cette lumière (ou d'une autre) soit de nouveau attirante.
Les cellules photoelectriques — du moins celles utilisées ici — ont un défaut : elles sont moins sensibles lorsqu'elles perçoivent de la lumière depuis un moment. Mais ce défaut s'est trouvé salutaire : il confère à l'engin une nuance de comportement hors programme : l'animal domine en partie sa réaction de recul et s'approche de plus en plus du danger.En cas de choc
Que se produit-il dans le cas d'un heurt ?
L'excès de courant dans le moteur de locomotion commande immédiatement la marche arrière, ainsi que l'inversion du courant des cellules. Cela pendant cinq à six secondes — le temps de parcourir 30 à 50 cm. Puis c'est de nouveau la marche avant, mais le parcours n'est plus le même.
Si l'obstacle est heurté pendant un recul, alors intervient une désensibilisation à la lumière.
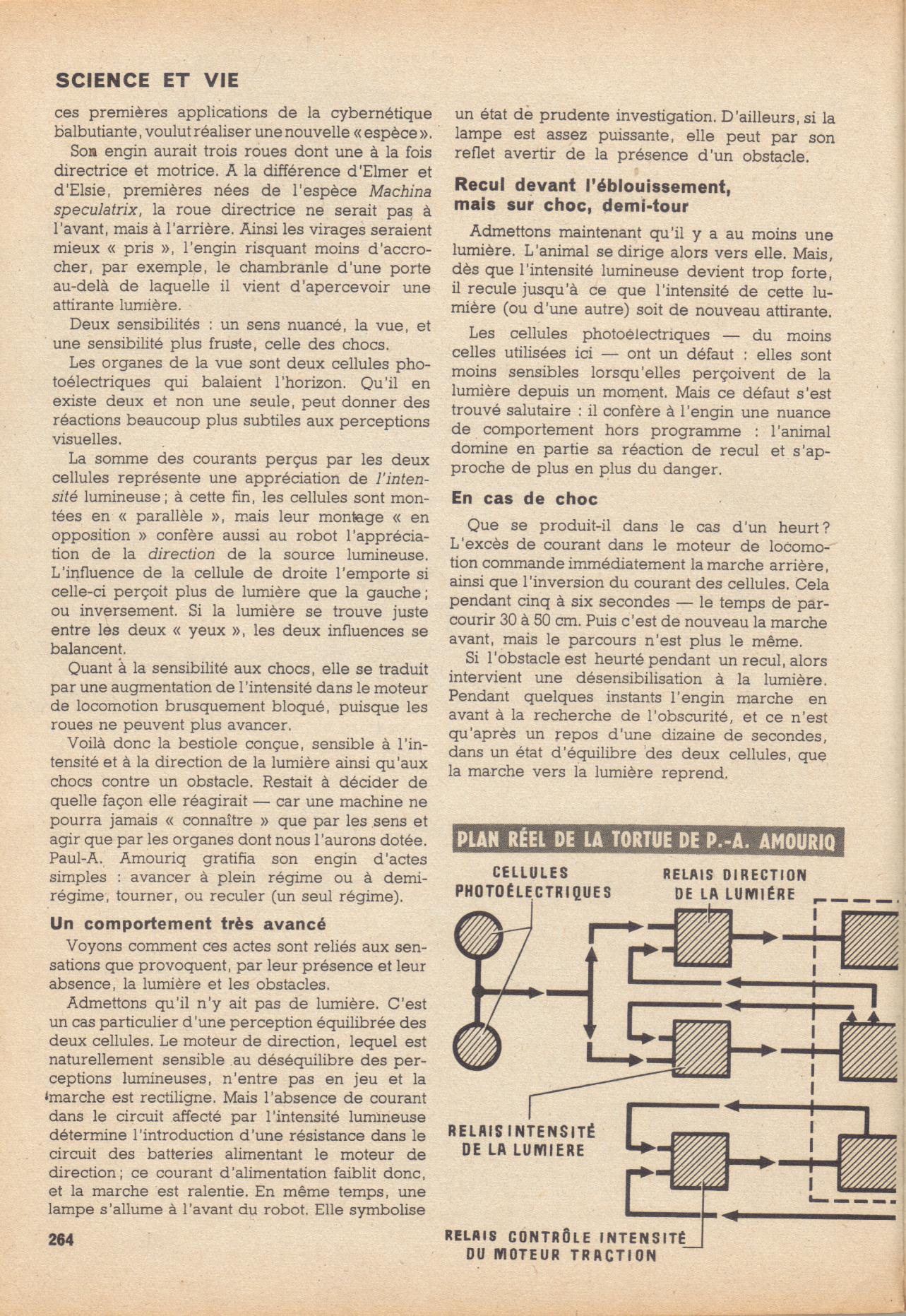
Pendant quelques instants l'engin marche en avant à la recherche de l'obscurité, et ce n'est qu'après un repos d'une dizaine de secondes, dans un état d'équilibre des deux cellules, que la marche vers la lumière reprend.PLAN RÉEL DE LA TORTUE DE P.-A, AMOURIQ
Simplicité et sensibilité
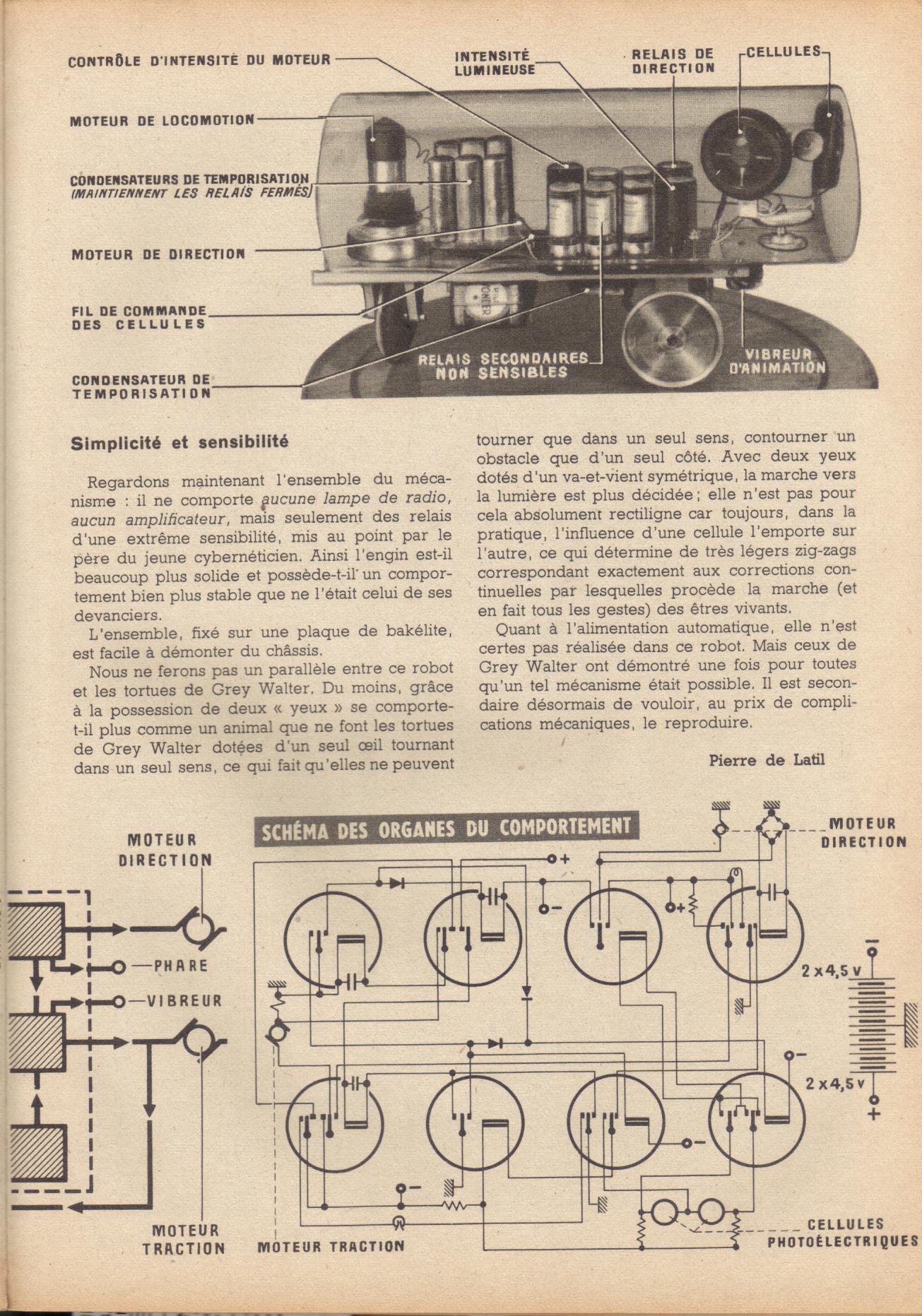
Regardons maintenant l'ensemble du mécanisme : il ne comporte aucune lampe de radio, aucun amplificateur, mais seulement des relais d'une extrême sensibilité, mis au point par le père du jeune cybernéticien. Ainsi l'engin est-il beaucoup plus solide et possède-t-il" un comportement bien plus stable que ne l'était celui de ses devanciers.
L'ensemble, fixé sur une plaque de bakélite, est facile à démonter du châssis. Nous ne ferons pas un parallèle entre ce robot et les tortues de Grey Walter. Du moins, grâce à la possession de deux « yeux » se comportet-il plus comme un animal que ne font les tortues de Grey Walter dotées d'un seul oeil tournant dans un seul sens, ce qui fait qu'elles ne peuvent tourner que dans un seul sens, contourner un obstacle que d'un seul côté. Avec deux yeux dotés d'un va-et-vient symétrique, la marche vers la lumière est plus décidée ; elle n'est pas pour cela absolument rectiligne car toujours, dans la pratique, l'influence d'une cellule l'emporte sur l'autre, ce qui détermine de très légers zig-zags correspondant exactement aux corrections continuelles par lesquelles procède la marche (et en fait tous les gestes) des êtres vivants.
Quant à l'alimentation automatique, elle n'est certes pas réalisée dans ce robot.Mais ceux de Grey Walter ont démontré une fois pour toutes qu'un tel mécanisme était possible. Il est secondaire désormais de vouloir, au prix de complications mécaniques, le reproduire.
Pierre de Latil
SCHÉMA DES ORGANES DU COMPORTEMENT
Using Google language translator:
Attracted by the light and knowledge around the obstacle, the turtle P.-A. Amouriq is better organized cyber robots.
P.-A. Amouriq REPLACE THE FRONT OF THE TURTLE WHICH ARE SIMPLY CARRIER
STUDENTS TO CONSTRUCT AN ANIMAL ARTIFICIAL
An animal more artificial, manufactured by a young man of seventeen years? …
Simple 'DIY' amateur imitation of precedents, will he be tempted to think.
But first, when Paul-Alain Amouriq, then a student of "mathelem" Louis-le-Grand (he now prepares his BSc) built on was two years ago, and no one had yet given lineage to the famous "turtle" by Walter Gray.
Then the autonomous vehicle is not automatic and an improvisation. Rather, it is calculated, it is better built, better organized various "turtle", the only one that is not done with simple pieces of "meccano". It should be noted that the student enjoyed the support of a large firm of electrical measuring instruments which his father is the director.
Completely machined duralumin, his machine is not a simple copy improved "species" of previous artificial animals. It has many original features.Drawing inspiration from "Science and Life"
In reading the article on Science and Life by turtles electronic Grey Walter that P.-A. Amouriq, including the interest of the first applications of cybernetics in its infancy, would produce a new "species".
His machine would have three wheels with both a director and driving. Unlike Elmer and Elsie, first born of the species Machina speculatrix , the steering wheel would not be in front, but on the back. Thus the curves are better "caught" the craft less likely to hang, for example, the jamb of a door beyond which it has seen an attractive light.
Two sensitivities: a nuanced sense, sight, and sensitivity crudest, the shocks.
The organs of sight are two photocells sweeping horizon.That there are two rather than one, can provide much more subtle reactions to visual perceptions.
The sum of the currents collected by the two cells represents an assessment of light intensity and to this end, the cells are connected in "parallel, but mounting" in opposition "also gives the robot the assessment of the direction of the source light.
The influence of cell line wins if it receives more light than the left, or vice versa. If the light is just between the two "eyes", the two influences are balanced. As for sensitivity to shock, it results in an increased intensity in the locomotive engine suddenly stopped, because the wheels can not move anymore. So that the creature designed, sensitive to the intensity and direction of light as well as a barrier against shock. It remained to decide how she would react – because a machine can never "know" only through the senses and act as the bodies which we have endowed.
Paul-A. Amouriq bestowed his gear acts of simple forward at full or half-system, turn, or back (one system).Conduct advanced
Let's see how these acts are linked to sensations that provoke, by their presence and absence, light and obstacles. Let there be no light. It is a special case of a balanced perception of the two cells. The engine management, which is naturally sensitive to the imbalance of light perception, is not at stake and walk a straight line. But the absence of current in the circuit affected by light intensity determines the introduction of resistance in the circuit of the batteries supplied to the engine management; the supply current weakens, then, and walking is slow. At the same time, a lamp lit in front of the robot. It symbolizes a state of cautious investigation. Moreover, if the lamp is powerful enough, she can tell by his reflection in the presence of an obstacle.
Decline to glare, but on shock, turn
Suppose now that there is at least one light. The animal then heads towards it. But when the light intensity becomes too strong, it recedes until the intensity of the light (or another) is again appealing.
Photoelectric cells – at least those used here – have a flaw: they are less sensitive when they receive light for a while. But this defect has been salutary; it gives the vehicle a shade of behaviour outside the program: the animal dominates in part of its response comes back and more danger.Collision
What happens in the case of a clash?
The excess current in the motor control of locomotion immediately reversing, and reversing the flow of cells. That for five to six seconds – time to walk 30 to 50 cm. Then again it forward, but the term is no longer the same.
If the obstacle is hit during a fall, then comes a desensitization to light.
For a few moments the craft forward march in search of darkness, and only after a rest of about ten seconds in a steady state of two cells, as walking towards the light resumed.MAP OF THE REAL TURTLE P.-A Amouriq
Simplicity and sensitivity
Now look at the whole system: it contains no radio tube, no amplifier, but only relays extreme sensitivity, developed by the young father of Cybernetics. Thus the gear he is much stronger and has he "behaviour much more stable than was that of his predecessors.
The complex, set on a bakelite plate is easy to disassemble chassis. We will not make a parallel between this robot and the turtles Walter Gray. At least, thanks to the possession of two "eyes" are comparable to more like an animal than for turtles Grey Walter's with a single eye turning in one direction, thus they can only rotate in one direction, around an obstacle on one side. With both eyes with a back-and-forth symmetrical walking towards the light is decided, it is not absolutely straight because it always, in practice, the influence of a cell outweighs the other, which determines very slight zig-zag match exactly with continual adjustments by which conducts walking (and indeed all the actions) of living beings.
As for the ADF, it is certainly not done in this robot.But those of Grey Walter demonstrated once and for all that such a mechanism was possible. It is now secondary to want at the price of mechanical complications, reproduce.
Pierre de Latil
ARRANGEMENT OF BODIES OF CONDUCT
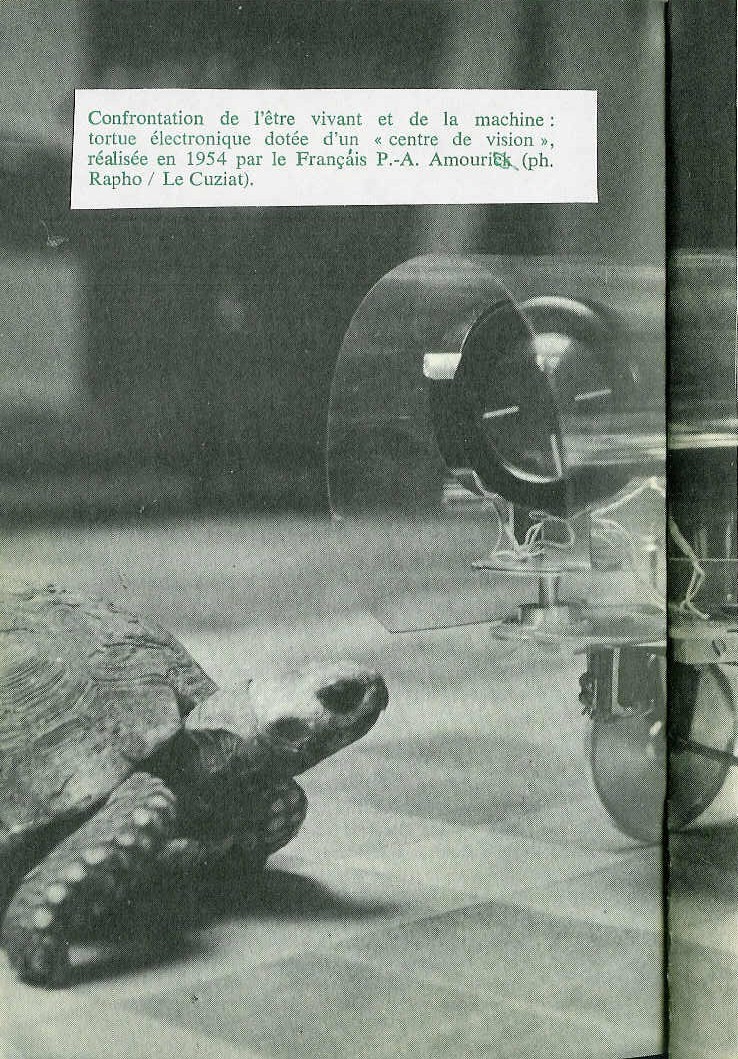
Photo taken at a zoo in Paris. Image courtesy A.-P. Amouriq 2009.
STOP PRESS – 9th Oct 09
Wonderful news – Paul A. AMOURIQ saw this post about his "la tortue" and posted the first ever comment to my new blog. Thanks Paul.
He has sent through some further information, plus a picture of what "la tortue" looks like now, after some technology modifications.
"Hello Reuben,I will try to send you a not too old video clip of the tortue. Many years ago it has been equipted with a shell, the huge condensers and the batteries have been replaced by smaller ones and the chassis could be shortened. But it spent many years in a cellar and I had to repair it, change the selenium photocells (fortunately I could find the manufacturer, then retired, who still was having a couple of cells in a drawer and who has been kind enough to give them to me) try to make the old relays working again. The 3 sensitive (black) relays are galvanometers with one contact on the pointer and 2 adjustable platinum contacts, one on each side.I had seen the Elmer and Elsie of Grey Walter in 1949 in an article of the Science et Vie and that gave me the idea to try and make one. In fact I made about 4 models with Meccano pieces before making the one you know with the help of an engineer who machined the metal parts according to my drawings and instructions.I met Albert Ducrocq and his partner in an exibition. Their renard was very slow and I never saw it really working but just moving a few centimeters.With my best regards.Paul A. AMOURIQ"

quelle bonne info, merci pour ce post .
Still alive. Videos available to see the tortue going along.
Paul A. AMOURIQ