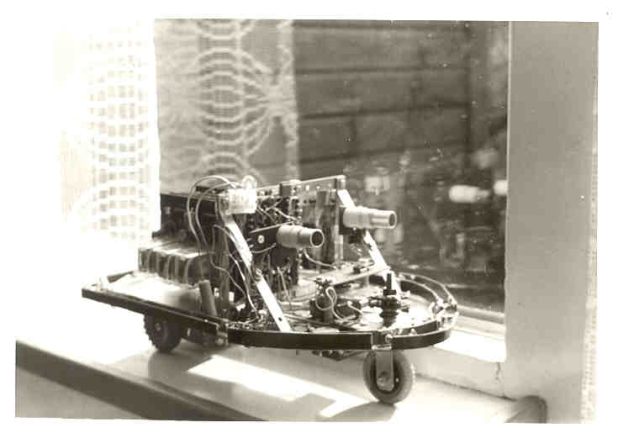
The mouse machine was built around two servo motors. One is underneath the robot and drives the two rear wheels. The second servo, visible in the front part, moves a steering wheel to the left or right. There are three of those old fashioned relays visible on the left, used to activate the servo motors. All around the robot are a series of bumper contacts that provide collision information. There are two light sensitive cells in the two tubes in front that serve as eyes to steer towards a light source. It would drive around and the direction would be determined by the relative levels of light coming form the right and the left. And it worked its way around obstacles using the bumpers. This was built in the late 1960's and as far as Johan remembers it worked quite well.
(*-Johan de Boer currently lives in Canada.)
Hi man! what’s up?
I’m a big fan of your blog 🙂
cheers from Italy!
Valeria