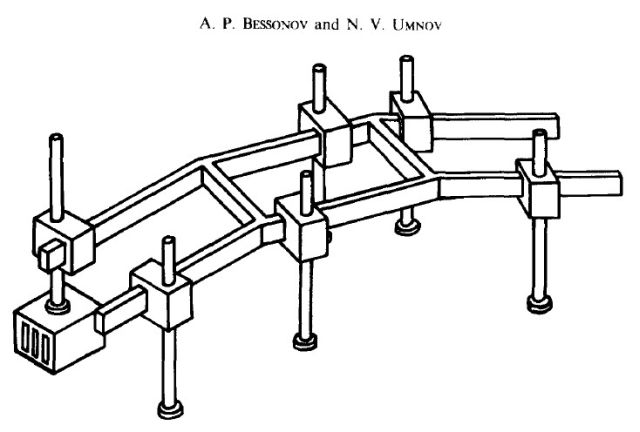
Diagram from Bessonov's and Umnov's paper.
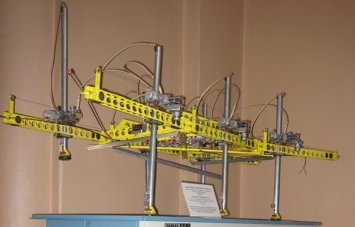
As seen at the Russian Polytechnic Museum in Moscow.
Abstract from Bessonov's and Umnov's 1983 paper.
This paper shows that in the task of the maintenance of constant orientation of the body of a walking robot the determination of the actual position of the body, i.e. absolute altitudes of its points and remoteness from the supporting surface, is the most complicated problem. Two possible systems of measurement and stabilization of the position by the height of the body of the walking mechanism are compared, i.e. a system of adaptation automatically adjusting the length of the supporting leg to the roughness of the terrain, and the system of the maintenance of constant remoteness of the body from the terrain. The inefficiency of a solitary application of any described system is revealed and the possibility of an accumulation of errors of the position of the body by the walking on the soft terrain is shown.
Possible approaches for raising the quality of stabilization of the body by the walking are evaluated.