The “Bible” of the Biocybernetics Department
dnipt.irtc.org.ua/history.html
In 1964 Nikolai Mikhailovitch Amosov formulated a hypothesis on the information processing mechanisms of the human brain. Within this hypothesis he expressed his system-level observations on the brain’s structure and the mechanisms that are made operational by a human’s mental functions. Of principal importance was the fact that it was not the separate structures, mechanisms or functions (such as memory, perception, learning and so on) that became the simulation object, but the brain of the human as a social being – the brain of homo sapiens. Such was the main idea of the monograph “Modeling of Thinking and of the Mind”, published in 1965, which for a couple of decades became the bible for several generations of Department’s researchers (and not only for them).
Realization of N.M. Amosov’s ideas through computers and robots
The reaction of the Soviet scientific circles to the appearance of this monograph can in general be evaluated as a weakly aggressive one. On the one hand, by that time physiologists and the “great philosophers” of physiology were clearly fatigued by the wide discussion concerning the firmness of core postulates of I.P. Pavlov’s theories of higher nervous activity, that was hosted by the “Voprosy filosofii” (“Philosophical Issues”) journal and initiated by a well-known physiologist A.N. Bernstein. In this discussion the traditional physiologists suffered a considerable defeat, albeit not a complete one. Much became “allowed”, in particular, the statement on irreducibility of higher brain functions to lower ones was shaken. On the other hand, psychologists and the “great philosophers” of psychology were by that time thoroughly contaminated by widely accepted cybernetics concepts. Studies in which mental processes were explicitly treated as information processing started to appear, and ideological doctrines that dominated psychology for many years had already been weakened, but remained influential. (It is interesting to note that in those years, psychological publications were still found in bookstores under the heading “The Theory of Marxism-Leninism”.) Under these conditions the publishing of N.M. Amosov’s monograph was not met with official rejection (which would absolutely have not been possible five or ten years ago) and the Department’s work continued without interference. The fact that N.M. Amosov was a deputy of Supreme Soviet of the Soviet Union has apparently played its role: at the time, this was an important argument for “ideological acceptability” of his theories.
The ideas, which N.M. Amosov put forward in his book “Modeling of Thinking and of the Mind” were further developed in his subsequent works (“Modeling of Complex Systems”, “Artificial Intelligence”, “Algorithms of the Mind”, “Human Nature”).
Nikolay Mikhailovitch Amosov (c2000)
Period of Robototechnics
The initial orientation of Amosov school research towards complex modeling of mental functions has determined to a considerable extent the “robot-technical” trend of subsequent research conducted in the Department.
It should be noted that in 1980s, the robot-technical subject area became quite popular in the USSR. Moreover, even direct instructions from the party and the government were given, concerning the particular topicality of research in the given direction. Thus a certain niche was created, in which many developers of issues within AI could find a spot. As time went by, however, it turned out that the country’s industry could not ensure effective use of high-intelligence devices offered by the scientists, thus the robot-technical boom slowly subsided. Nevertheless, for several years this line of research was yielding some quite interesting scientific results.
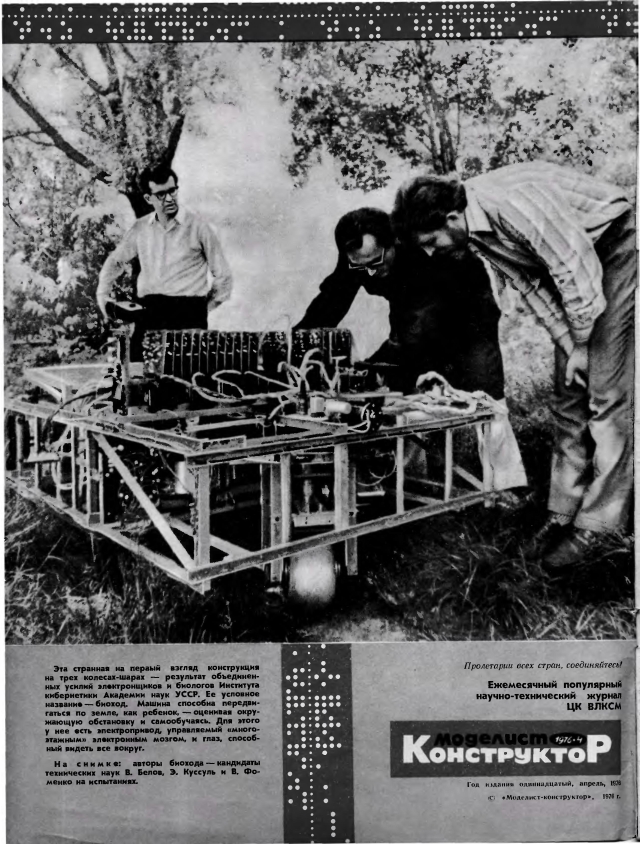
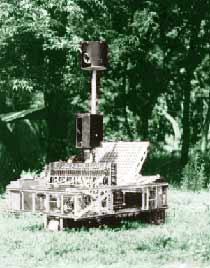
The signs of approaching crisis in neural cybernetics were stimulated by work aimed at obtaining results that could have a practical, applied value. For N.M. Amosov’s Department, this research turned out to be naturally connected to creating prototypes of autonomous mobile robots and to neural network control systems development. It should be said that in the initial stage of this “prototype epic” Nikolay Mikhailovitch Amosov strongly objected to such a digression to hardware. But he was successfully reassured, and as a result, a whole family of robots of this kind was developed and studied. A research member of the Amosov Department, E.M. Kussul, initiated and supervised this line of research (it was him who headed the Biocybernetics department after N.M. Amosov has vacated that position). In 1972-1975, the first autonomous transport robot in the USSR was created, TAIR (see Figure 3). Its development was completed with a successful presentation of the derived results during the Fourth International Conference on Artificial Intelligence in Tbilisi in 1975 (a short-length film about TAIR was shot and demonstrated at the conference). The robot demonstrated purposive movement in natural environment, obstacle avoidance and similar actions. TAIR was a three-wheel power barrow equipped with a system of sensors (rangefinder and tactile sensors). It was controled by a hardware-implemented neural network (the network nodes – special transistor electronic circuits; links between nodes – resistors).
TAIR is taking a “walk”
TAIR’s testing was conducted in the park near the Amosov Clinic for heart surgery. (At the time, the department of biocybernetics was located on the clinic's premises and N.M. Amosov headed simultaneously both the clinic and the Department). While moving, the robot was supposed to avoid obstacles, such as people, trees, park benches and so on. Coordinates of a point on the environment gave the target of robot’s motion. TAIR’s pilot research demonstrated that it was in principle possible to create an entirely autonomous robot operated by a hardware-implemented neural network. At the same time, it showed the overall complexity of organization of the robot's interaction with the natural environment, as well as the necessity of using trainable neural networks. The analysis of capabilities for creating teachable robots with neural network control systems was carried out using the MALYSH prototype created in 1979.
Later on several more robots were built, on which various motion control and natural environment interaction circuits were tested. In 1980-1981, a STAR transport robot prototype was built, which was used for working through control algorithms for a “large” transport robot created on basis of a commercial truck loader.
In 1984-1986, analysis and refining of algorithms for control of robot movement in a natural environment were continued using the MAVR prototype. This research work was ordered by the USSR Ministry of Defense and was directed at building an autonomous robot capable of moving under conditions of a complex uneven environment. Unique structural solutions provided MAVR with high maneuverability and reliable protection of control circuits, located inside barrel-shaped wheels. Environmental data came through rangefinders, optical and tactile sensors onto the hardware-implemented (vehicle-borne computer) neural network. Decision about the movement direction or other actions within the decision-making block was made upon processing the input information. The decisions taken were activated by appropriate actuating mechanisms.
The MAVR robot
The MAVR research marked the end of the “robot-technical” period of the N.M. Amosov School. The obtained results are presented in a composite monograph “Neurocomputers and Intelligent Robots”. It should be noted that this monograph summed up the main results of departmental research work during 1980s, and its contents were well beyond the robot-technical subject-matter itself. In particular, this monograph presented the findings of intensive research work directed at creating methods and practical techniques for using neural networks in building expert systems based on formalization of estimative expert knowledge, which is usually quite vague and difficult to formalize. Creation of a development program system VESTA was the practical outcome of this research work. VESTA supported expert's efforts on autoformalization of its own knowledge in the form of a neural network structure, capable of automatically transforming itself into a decision-making support system.