
.jpg)
tm_1971_09p43RobotsSirbijak3
1967-Sibiryak-СибирÑк
google translate
"Sibiryak-3" VNUK, SIBIRYAKA-1 " AND SON "Sibiryak-2,
familiar to our readers (see TM No. 6, 1967). Made in the Omsk region house engineering students vocational training schools No. 2 and No. 5. Inherited the family profession guide Pavilion «Proftehobrazovanie» to VDNKh. The sequence of actions the robot is defined task, I / O
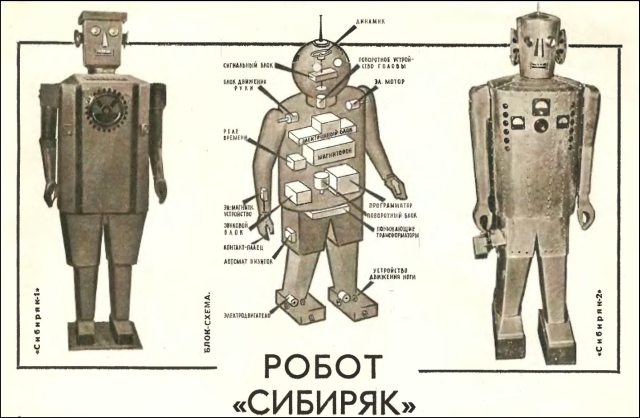
ing to the program pack – set of disks c cam zamykatelyami. Programmnst turns Disna the necessary angles. After clicking «Pusn» drives slowly begin to rotate. (Robot «alive» and vote: his chest is a microphone, a signal c which includes an audio relay unit.) Movement is transmitted from the gearbox, coupled c software engine. Each lobe in due course closes limit switch. The signal comes in block relay automation, including the executive and the appropriate mechanism
through the group of relays. As the cams are rotated relative to each other, then each subsequent
command is issued after the time it takes to turn the disc to a corner. B otlnchie of «Sibiryaka-2», a software unit «Sibiryaka-3» improved: tekstolitovye drives c kontaktny MI groups replaced metallichesknmn drives c system vynlyuchateley end.
Improve the reliability of the unit. As our readers will recall, «Sibiryak-2», except for all – On others, handed out business visitors cards. «Sibiryak-3» nesereznym such a thing is not involved. Its function is strictly subordinated to the main goal – demonstratsni exhibits. Based on etik considerations, Omsk robotostroiteln somewhat changed the location of the nodes uluchshiln installation, removed the not-so-necessary and a block of flashing eyes. B result «Sibiryak-3» much better c eiskursovoda role
babel
„SIBERIAN -3”, GRANDSON, [SIBIRYaKA]-1" AND THE SON of „Of [sIBIRYaKA]-2" , well familiar to our readers (see TM No. 6 in 1967 g.). It is prepared in with Omsk provincial the house of the technology [proftekhobrazovannya] by the students of PTU No. 2 and No. 5. it inherited the family profession of the guide in pavilion “professional and technical education” at VDNKh (Exhibition of Achievements of the National Economy of the USSR). The sequence of behavior of robot is determined by task, introduce [mym] in the program block – collection the disks c by cam contact makers. It [programmnst] it turns [disni] to the necessary angles. The disks begin to slowly revolve after pushing of knob “launching”. (Robot “revives”, also, from the voice: in its breast is established the microphone, whose signal c includes the relay of sound unit.) Motion is transmitted from reducer, coupled c by program engine. Each fist in its time locks limit switch. Signal enters the unit of relay automation, including necessary they are executive y the mechanism through the appropriate group of relay. Since all fists are turned relative to each other, then each following command reveals after the time, spent on the turning of disk to the preset angle. B [otlnchie] from “the Siberian -2”, the program block “of Siberian -3” is [usovershenstvovan]: textolite disks c are contact mi by groups they are substituted [metallichesknmn] with disks c by the system of the end [vynlyuchateley]. The reliability of the operation of block increased. As our remember the readers, “Siberian -2”, besides all GO of other, it gave out to the visitors visiting card. “Siberian -3” it is not occupied by this unimportant matter. Its functions are strictly subordinated to central objective – [demonstratsni] of exhibits. On the basis of the ethics of considerations, Omsk of [robotostroiteln] somewhat changed the arrangement of units, [uluchshiln] installation, excluded are so are already they were necessary y the unit of the winking of eyes. B result “Siberian -3” where better manages by c by the role of [eiskursovoda].
„СИБИРЯК-З”,
Ð’ÐУК ,,СИБИРЯКÐ-1"
И СЫР„СИБИРЯКÐ-2",
хорошо знакомых нашим читателÑм (Ñм. ТМ No. 6 за 1967 г.). Изготовлен в ОмÑком облаÑтном доме техники Ð¿Ñ€Ð¾Ñ„Ñ‚ÐµÑ…Ð¾Ð±Ñ€Ð°Ð·Ð¾Ð²Ð°Ð½Ð½Ñ ÑƒÑ‡Ð°Ñ‰Ð¸Ð¼Ð¸ÑÑ ÐŸÐ¢Ð£ No. 2 и No. 5. УнаÑледовал Ñемейную профеÑÑию ÑкÑкурÑовода в павильоне «ÐŸÑ€Ð¾Ñ„техобразование» на ВДÐÐ¥. ПоÑледовательноÑÑ‚ÑŒ поÑтупков робота определÑетÑÑ Ð·Ð°Ð´Ð°Ð½Ð¸ÐµÐ¼, вводи-
мым в программный блок — набор диÑков c кулачковыми замыкателÑми. ПрограммиÑÑ‚ поворачивает диÑни на необходимые углы. ПоÑле Ð½Ð°Ð¶Ð°Ñ‚Ð¸Ñ ÐºÐ½Ð¾Ð¿ÐºÐ¸ «ÐŸÑƒÑн» диÑки начинают медленно вращатьÑÑ. (Робот «Ð¾Ð¶Ð¸Ð²Ð°ÐµÑ‚» и от голоÑа: в его груди уÑтановлен микрофон, Ñигнал c которого включает реле звукового блока.) Движение передаетÑÑ Ð¾Ñ‚ редуктора, Ñцепленного c программным двигателем. Каждый кулачок в Ñвое Ð²Ñ€ÐµÐ¼Ñ Ð·Ð°Ð¼Ñ‹ÐºÐ°ÐµÑ‚ концевой выключатель. Сигнал поÑтупает в блок релейной автоматики, Ð²ÐºÐ»ÑŽÑ‡Ð°Ñ Ð½ÑƒÐ¶Ð½Ñ‹Ð¹ иÑполнительны й механизм
через ÑоответÑтвующую группу реле. Так как вÑе кулачки повернуты друг отноÑительно друга, то ÐºÐ°Ð¶Ð´Ð°Ñ Ð¿Ð¾ÑÐ»ÐµÐ´ÑƒÑŽÑ‰Ð°Ñ ÐºÐ¾Ð¼Ð°Ð½Ð´Ð° выдаетÑÑ ÑпуÑÑ‚Ñ Ð²Ñ€ÐµÐ¼Ñ, затрачиваемое на поворот диÑка на заданный угол. B отлнчие от «Ð¡Ð½Ð±Ð¸Ñ€Ñка-2», программный блок «Ð¡Ð½Ð±Ð¸Ñ€Ñка-3» уÑовершенÑтвован: текÑтолитовые диÑки c контактны ми группами заменены еталличеÑкнмн диÑками c ÑиÑтемой концевых вынлючателей.
ПовыÑилаÑÑŒ надежноÑÑ‚ÑŒ работы блока. Как помнÑÑ‚ наши читатели, «Ð¡Ð½Ð±Ð¸Ñ€Ñк-2», кроме вÑего прочего, раздавал поÑетителÑм визитные карточки. «Ð¡Ð¸Ð±Ð¸Ñ€Ñк-3» таким неÑерьезным делом не занимаетÑÑ. Его функции Ñтрого подчинены главной цели — демонÑтрацни ÑкÑпонатов. ИÑÑ…Ð¾Ð´Ñ Ð¸Ð· Ñтик Ñоображений, омÑкие роботоÑтроителн неÑколько изменили раÑположение узлов, улучшилн монтаж, иÑключили не Ñтоль уж необходимы й блок Ð¼Ð¸Ð³Ð°Ð½Ð¸Ñ Ð³Ð»Ð°Ð·. B результате «Ð¡Ð¸Ð±Ð¸Ñ€Ñк-3» куда лучше ÑправлÑетÑÑ c ролью ÑиÑкурÑовода.
