
http://www.energodetal.ru/kibernetika-dlya-lyubitelej/konstrukciya-kiberneticheskix-zverej/element-chuvstvitelnyj-k-zvuku
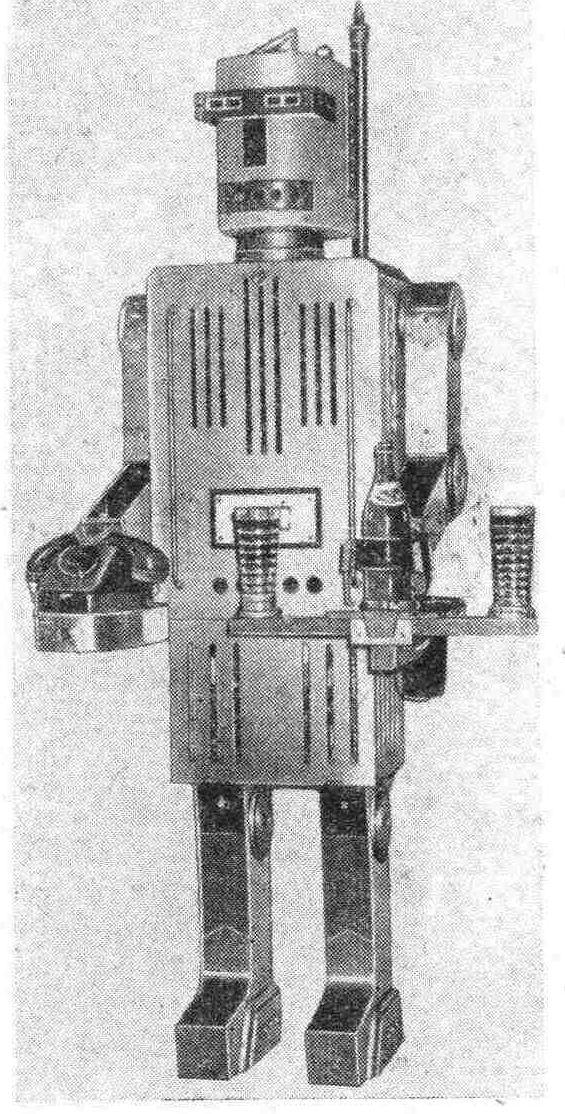
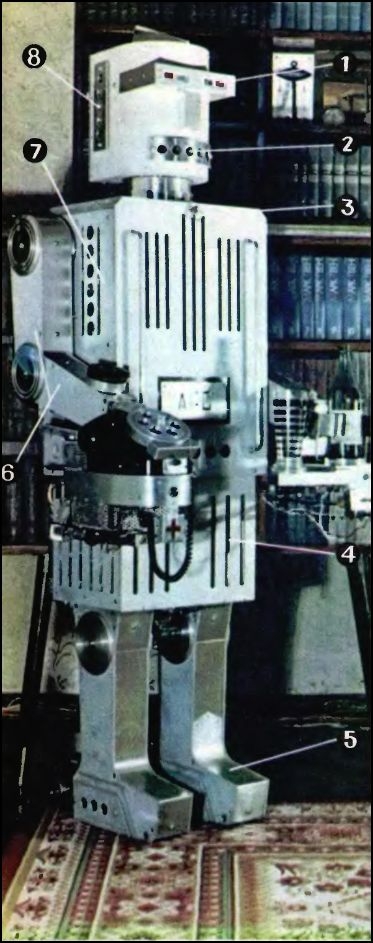
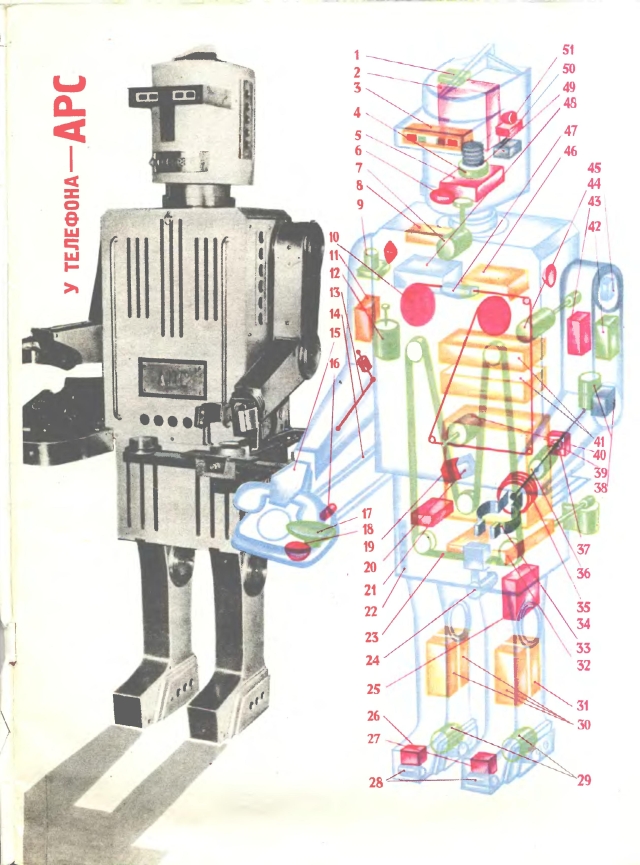
Universal Robot ARS
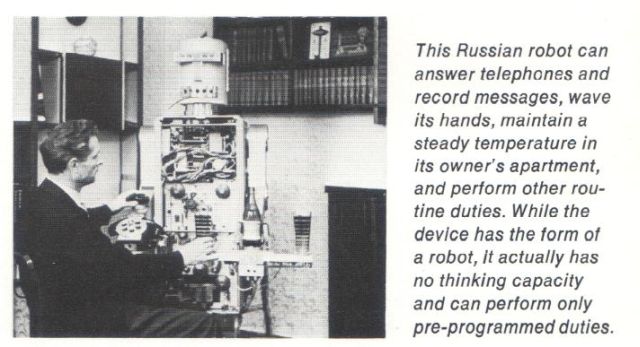
Universal Robot ARS. This machine is the result of three years of Boris Grishin (БориÑа Гришина) (USSR) and serves as the home secretary:
1. Responds to telephone calls and provides a record of 25 … 30 calls when the owner is not home.
From phone call triggered audio relay, which includes their contacts software device (built-in tape recorder). Robot raises his hand up, including a tape recorder to play, stepping seeker finds the appropriate entry on the tape, and the robot is "responsible". It sounds like this: "Responsible number 27-15. Comrade is not home. If you want something to send, I ask you, speak. The machine will be two minutes of recording what you say. Please, tell me!. This entry takes 20 … 22 pp. At this time the machine is ready to record. After two minutes, the robot puts the handset on the hook, and 5 to be returned to its original state. After the cycle described by the robot's eyes begin to glow (colored lights). If there was a lot of talk and the entire tape on reels of internal tape used up, the robot includes a tape recording standby.
2. If the owner was away for long, the robot is asked to wait by the phone or call later and calls time.
3. Brings telephone or gives up.
4. It is desired subscriber to send a message to obtain the necessary information by phone, call the fire brigade in case of fire. If you want to send the phone a text, his record on tape, record the phone number in the block automatic call and set the clock mechanism at the right time. At the programmed time will include meals and software device. As a result of the executive mechanism will lift the receiver and the machine will call the subscriber. After a short break, turned on the recorder (internal or external, if the record is long) and in handset loudspeaker recorder will be sent the message. There are times to ensure that the robot had to write a response to phone or write and ask the same phone number. Once the tube is omitted, automatic after 5 to return to its original state. If the subscriber's number was busy, the robot tries to call a few minutes. The entire process is recorded on tape.
5. Includes a set time radio, TV or tape recorder, etc.
6. Writes to tape broadcast. At certain times of included meals and programming unit, which includes over 15 with a receiver and an additional external tape recorder (if it is tube device). Then the recorder will begin its work in the recording mode. It is possible to multitrack recording different programs with any interruptions in time. Reels accommodate 1000 m tape.
7. Reminiscent of the scheduled order of the day: a meeting, visiting a doctor or a movie, etc.
8. Wakes host and conducts classes for morning exercises.
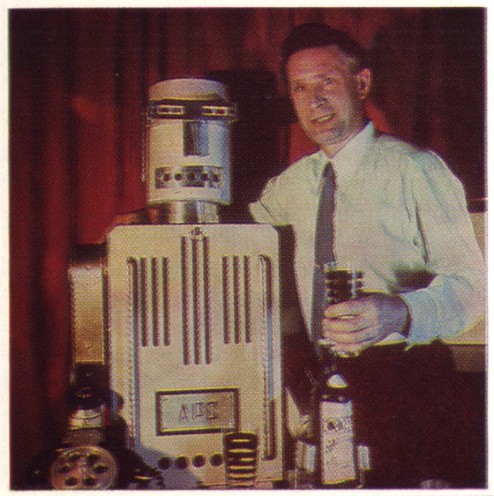
9. Meets guests: pulls his hand and utters a greeting, includes radio, television or tape recorder, treats guests soft drinks (pouring, carrying on a special table and offers a drink). When the front door comes a man, the robot learns about it from the photoelectric or inductive switches. Programming device includes food, the robot arm raised in greeting, and stepper searcher selects the appropriate record, which plays a tape recorder. The robot turns its head to both sides, his eyes, whose color changes, signaling the implementation of regular operation under the program. Omitting the left hand (arm), the robot includes an additional tape with recorded music. The recorder is equipped with an electromagnetic switch. If tape tube, then the robot includes his first for 15 seconds to warm up and then gives him a command of play. Then the robot moves closer to the "hand" table with a bottle and glasses, grabs a bottle, raise it, in turn, fills the cups and once again puts the bottle. After that, the robot moves forward table, thus giving like cups, and then removes it. After a few seconds, all devices automaton goes to the original state. In working condition the only relay in the entry door. Additional tape recorder is switched off automatically after recording. The robot is again ready to meet guests.
10. Enables or disables the internal and external lighting at home.
11. Maintains a constant temperature in the room (thanks to the controllers automatically includes a fan or radiators). If you are connected to the robot fire-sensitive elements located in different parts of the house, then when a dangerous situation he will fire.
12. Responsible, if someone knocks on the door or calls, invites to enter or say when the owner returns.
13. Can move in any direction.
14. It reacts to sound commands (whistle, voice, etc.).
Construction.
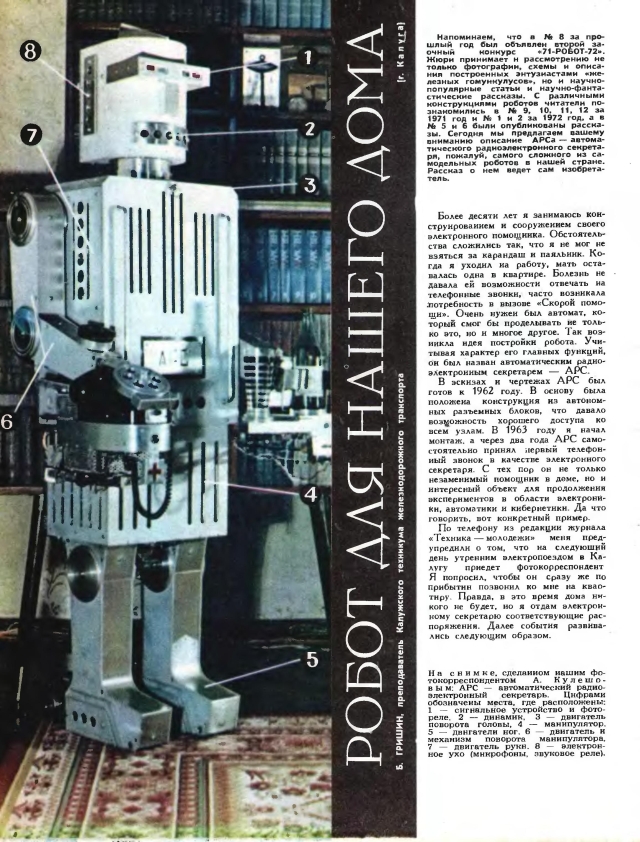
Size of the main parts of the robot roughly the same as a man of average height. Weight 100 kg. The robot is made of Ugolkova and sheet aluminum. The surface of the body has a matte and polished sections. All arrangements have observation windows with lids, hinged or screw. Side walls, top and bottom sheets are fixed. The thickness of the front sheets of 4 mm, 2 mm posterior. On the right side of the body screwed onto a table for the phone, on the left – slide-out table (for bottles and cups).
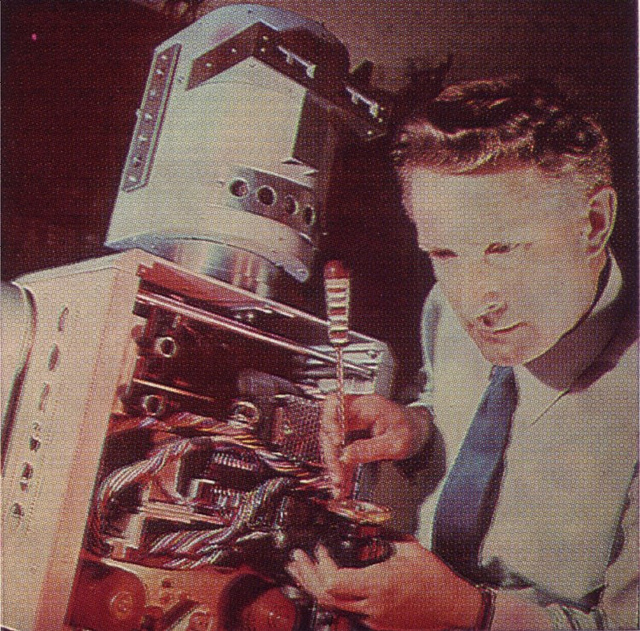
Robot driven by 13 motors with different mechanical transmissions. In the recorder used a specially designed tape transport mechanism.
Head.
It placed swing mechanism, limit switches, hub and axle. Rotation angle 100 °, to one side the head is rotated slowly, to another – quickly. This produces an additional effect, and furthermore, facilitates the coverage of fortified head photoresistor. Length of the neck 60 mm.
Hands.
Side walls are made of duralumin shoulder 2 mm thick, connected by rods with a diameter of 10 mm and screws M4. Elbow hung on hinges. The hands are driven by an electric motor with a worm-gear. The electric motor is located in the upper half of the body. Bending arms at the elbow managed by a different engine from the transmission, located on the side of the suspension, as well as block instruments and electromagnets. Limit deflection angles of the hand is restricted by the limit switches.
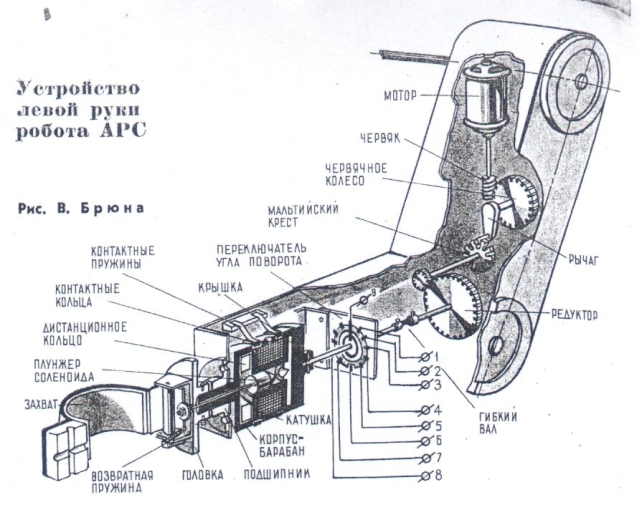
Right hand and took down the telephone receiver, the left (driven by the same engine) grabs the bottle and holding it in different positions. In addition, the mechanism of the left arm has a contact device to control additional external recorder (Figure 14.17).
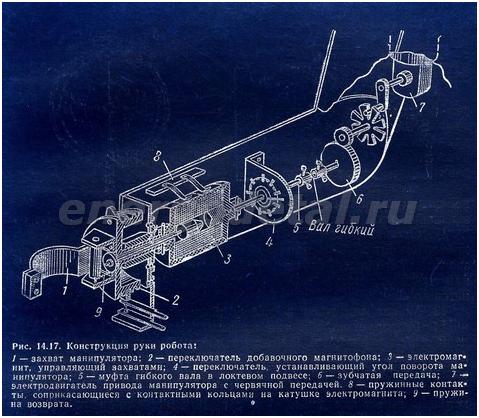
(ris.14.17) Construction Robot: 1 – the seizure of the manipulator 2 – Switch incremental tape, 3 – solenoid, the manager captures 4 – switch that sets the angle of rotation of the manipulator, 5 – flexible shaft coupling in the elbow suspension; 6 – gear, 7 – motor drive robot with worm-gear, 8 – spring contacts in contact with the slip rings on the coil of an electromagnet, 9 – spring return
Block, consisting of five levers and the same number of electromagnets, mounted in the additional tape. This unit allows the robot to include a tape recorder with a switch left hand (element 2 in Fig. 14.17).
Foot robot consists of side walls connected by a duralumin rod with a diameter of 12 mm and screws M5. The front parts are made of duralumin sheet thickness of 1,5 mm. At the bottom of each leg is a power transformer with rectifiers. The knee is a hinge connection. Foot (Fig. 14.18) is based on two large bearings (wheel), which in turn change the direction of motion.
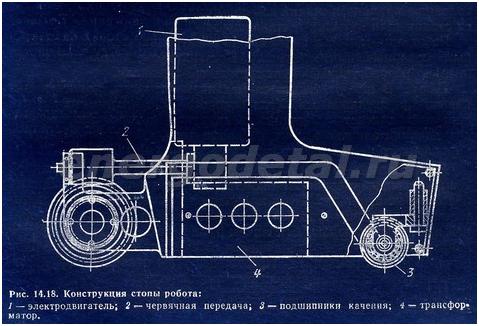
(ris.14.18) Construction of foot robot: 1 – electric motor, 2 – worm gear 3 – bearings, 4 – Transformer
The side wall stops are made of steel with a thickness of 4 mm. At the stop is part of the robot's motors running, thus enhancing the mechanical stability of the robot.
Mechanism to automatically call a phone call. As seen from Fig. 14.19, numbered disc removed from the apparatus and stand 2 is rigidly fixed.
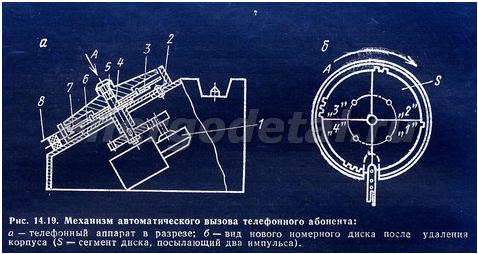
(ris.14.19) a mechanism to automatically call a phone caller: a – a telephone in the section, b – a new kind of number plate drive after removing the shell (S – segment of the disc, sending two impulses)
In case the apparatus includes: a small-size motor with transmission 1, the rotating shaft 4 with a hard disk planted 3 with four fingers 6. It is produced 40 segments with teeth. To do this, first cut ten discs with a diameter of 120 mm from Micarta 1,5 mm, each cut into four equal parts. At the edge of these segments are milled rectangular prongs. These are the ten segments of different types: four with one tooth, four – with two and so on up to ten teeth on the segment. Each segment has a hole for the nozzle finger.
Programming the desired phone number in the following way. Suppose that we need a number 12-34. Then on the drive 5 with the fingers 6 is placed motionless four segments 7, respectively, with I, 2, 3 ja 4 teeth. The presence of forty segments allows you to set any four-digit number. Segments pressed lid 5.
After switching on the electric motor starts to rotate the disc with the segments, and those his teeth affect contact device 8, which sends to the telephone network, the desired number of pulses in sequence. After one turn the motor itself stops. Enabling and disabling it made programming unit robot. The robot can call the subscriber both manually and automatically.
Reminder: such alterations telephones can be implemented only with the permission of the telephone unit.
To dial a phone number, no need to rotate the phone dial. After removal of the handset quickly presses and releases the lever apparatus and are thus the effect of a set of numbers using the disk. This operation can perform an electromagnet controlled drive encoder.
Two tape recorders and their tape winders are designed to work with ferromagnetic ribbons with width 6 and 18 mm. The wide ribbon on several tracks recorded job types that are read by magnetic heads, stepper control signals seeker, on a narrow – telephone information. The wide ribbon recorded as control pulses. The recorder has a single electric motor. Ribbons are pressed against the drive shaft with two rollers, driven by electromagnets. A narrow strip is wound on a reel, wide – is glued into the ring and moves on five guiding rollers. Magnetic tape heads are stationary narrow, broad – are mobile. Getting all the questions or messages indicated by the cut, designed to create inhibitory signal (stop pulse). It is formed in the mechanism of contact, through which a wide band ring with a multitrack recording. If you need to slow down quickly in the beginning of the tape recording, this mechanism closes the contacts through a slit in the tape. At this moment there is a capacitor discharge through a small resistance in the relay time. The relay contacts opens the circuit electromagnet, the control roller, pressed against a wide belt. This pressure roller moves away from the drive shaft, and the tape stops at the beginning of the recording. The electric motor, propelling a driving shaft of the recorder, it does not turn off, because they need to reach a narrow ribbon through another pressure roller. If necessary, the relay and electromagnet push back in this video. The engine turns off the tape when programing unit will issue such a command.
At precipice tape recorder is switched off the power. This is followed by automatic control of strip tension. Each entry of a broad belt lasts 25 to the ring it can be easily replaced by another new record.